Onshape 繪製仿身獸後進行Vrep模擬
onshape下載
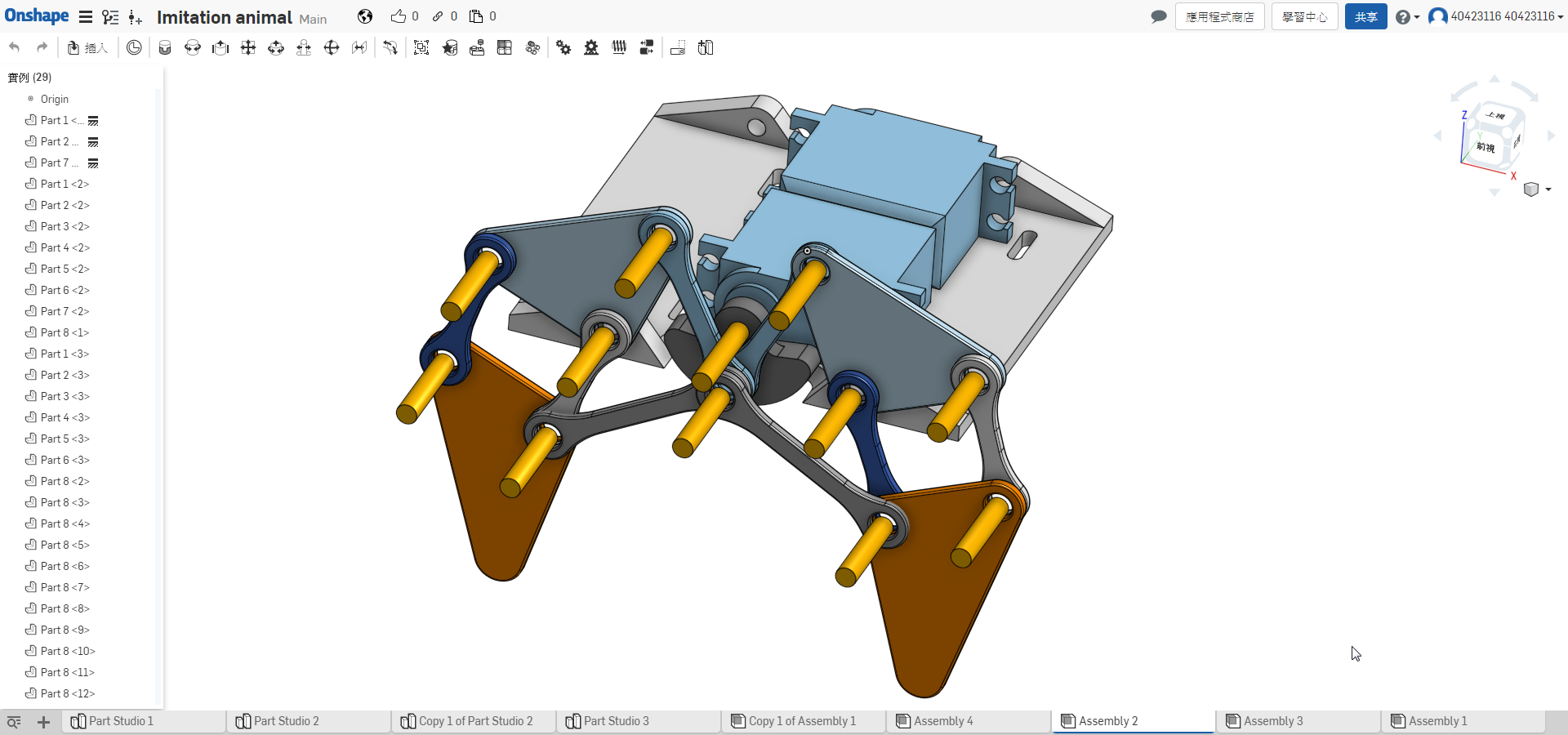
導入V_rep
接完一邊後複製並鏡射到另一邊
影片
虎尾科技大學 機械設計系 40423116 李冠辰 vrep 仿生獸一對腳 from 40423116 on Vimeo.
只有一對腳並不能完全讓仿身獸穩定行走
試著再組第二對腳,間隔180度

影片
虎尾科技大學 機械設計系 40423116 李冠辰 vrep 仿生獸兩對腳 from 40423116 on Vimeo.
雖然整體可以穩住不倒,但動作不實際,有零件轉過頭的現象
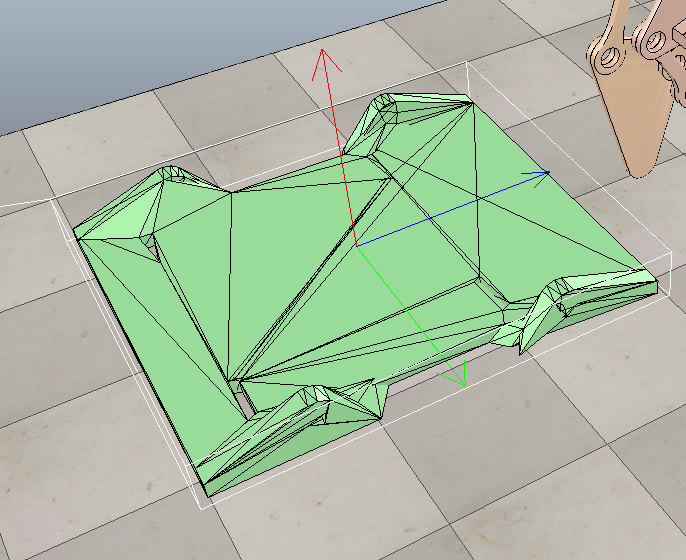
嘗試利用convex decomposition of selection(多邊形分解)將模型分解成多邊形,讓原本的模型只作為外觀作用,實際作業的是多邊形模型,這樣可以讓vrep再跑動作時可以順暢點
convex decomposition of selection
影片
這次將每個模型以多邊形分解試著讓vrep的動作變流暢(然而並沒有,但是能跑了)
不過仍然有關節處錯位的傾向
虎尾科技大學 機械設計系 40423116 李冠辰 vrep 仿身獸兩對腳(修正) from 40423116 on Vimeo.
3/15再進行修正
使用上一版沒有多邊形分解模型的版本
接伺服馬達(模型)的joint順位往前,變成Base接joint,(因為馬達固定於base上,所以當作base跟馬達為一體)
影片
虎尾科技大學 機械設計系 40423116 李冠辰 vrep 仿身獸 兩對腳 (在修正) from 40423116 on Vimeo.
得知問題出在base上的兩顆伺服馬達模型身上
下一步
我會聽老師建議,之後會嘗試用外部程式控制vrep模擬仿身獸走路路線
Comments
comments powered by Disqus