-
讀取 Pyslvs 機構資料
-
導入 PID 控制
讀取機構資料
1 | 目前整體資料格式採取 PMKS 表示法,並透過小型演算法進行 ODE 模型建立,目前有個小問題是處理八連桿出了點小問題還在想辦法修正。
|
# PMKS 表示式
example, inputs = ("M[" +
"J[R, color[Green], P[0.0, 0.0], L[ground, link_1]], " +
"J[R, color[Green], P[12.92, 32.53], L[link_1, link_2]], " +
"J[R, color[Green], P[73.28, 67.97], L[link_2, link_3]], " +
"J[R, color[Green], P[33.3, 66.95], L[link_2]], " +
"J[R, color[Green], P[90.0, 0.0], L[ground, link_3]]" +
"]", {0: ('ground', 'link_1')})
成果圖

以可讀取 R 接頭,接下來會新增 P 接頭以及其他可用的平面連接件
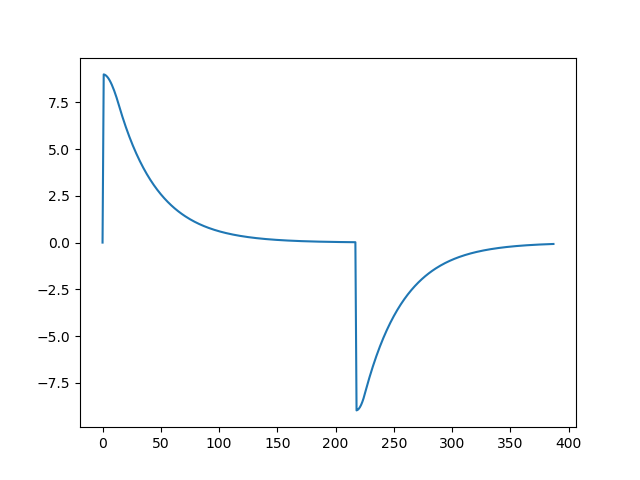
導入 PID 控制

透過設計一 PID 控制器,使用速度迴路控制,回授為當前角度,但是目前沒有設計一個好的速度規劃的控制方法,單純使用 P control 進行位置控制。
設計不好的控制系統,產生了極大的速度可能會有暴衝。
預計新增項目
- 增加樹狀結構,讓使用者可以清楚看到目前機構的樣子
- 增加使用者設計控制系統的彈性
- 新增使用者將控制的圖畫出來
Comments
comments powered by Disqus