-
開發日誌
-
採用plugin設計
-
pypot
-
開發日誌 ===
採用plugin方式設計
使用模組的方式設計,目前還沒有想到主介面要設計的樣式或者格式,目前的想法是想要使用把pybot拆開使用,要找BUG也比較不會動到主程式導致許多Bug出現。
-pybot安裝方法
[pypot library][http://poppy-project.github.io/pypot/]
[poppy-humanoid][https://github.com/poppy-project/poppy-humanoid]
pip install pypot poppy_humanoid
使用github安裝
python setup.py install
測試Lib
from pypot.vrep import from_vrep from poppy_humanoid import PoppyHumanoid
-馬達(Dynamixel motors control)部分
pypot使用Dynamixel提供的馬達來做控制的函式庫做控制,在說明文件裡面有提供註冊馬達的方法,這部分還在看相關文件說明。
pypot
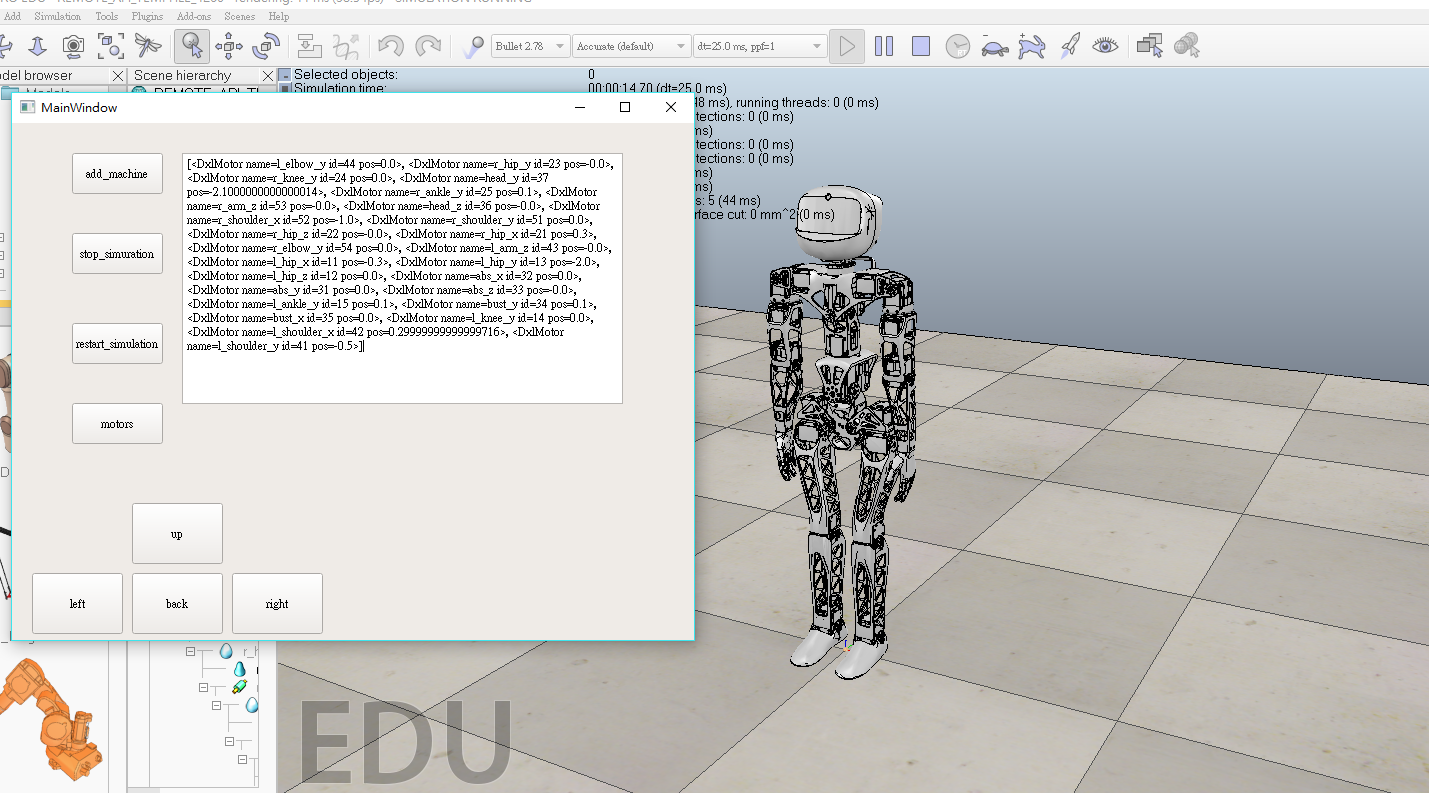
針對文件說明檔寫了一個小型的介面還來控制poppy_humanoid
[倉儲位置][https://github.com/kmolLin/Pyquino_plugin]
打破一般傳統需要先進行開檔的動作(sceane)

進行頭部馬達的控制分別進行45度

做了一個小介面把功能鍵放入介面裡面,這個功能是把每顆馬達目前的位置旋轉角度全部回傳
利用亂數在左手臂上面進行位置(IK),給他座標後,他會自己判斷哪些馬達要移動到端點座標的方法,猜想這部分是使用Vrep內建的IK去算出來的,但是也不確定是不是套入公式帶出解,這部分要看code才會知道
目標
自定義馬達,自定義機構,利用同樣的方式進行,看看是否可以達成同樣的目標。 自定義這邊我可能先使用四連桿機構或八連桿機構進行馬達控制,先不論外部控制的部分,先從內部下手,把模擬出來的控制方法和每顆馬達控制的轉速和扭距都畫出來,在做實體來驗證機構。
Comments
comments powered by Disqus