目前仿生獸的進度以及設計新的軸連接器來替代傳動立不足的零件
目前八連桿仿生獸進度 試著組第一層腳並接上android控制步進馬達
虎尾科技大學 機械設計系 40423116 李冠辰-八連趕運轉測試1 from 40423116 on Vimeo.
3D列印八連桿腳

步進馬達需要圓輪來聯動其他八連桿運動,並且要連接另外兩個圓輪來傳動第二層八連桿,中間夾一個支撐座來固定軸位置


但兩個圓輪之間僅用螺絲鎖緊,只靠摩擦力在傳動

 只靠摩擦力是不足以傳動其他八連桿,而且會造成角度偏移(兩孔位置之間必須夾60度)所以重新設計新的零件來改善問題
只靠摩擦力是不足以傳動其他八連桿,而且會造成角度偏移(兩孔位置之間必須夾60度)所以重新設計新的零件來改善問題
軸連接器
兩個圓輪之間長出類似冠齒輪的形狀,一面凹一面凸
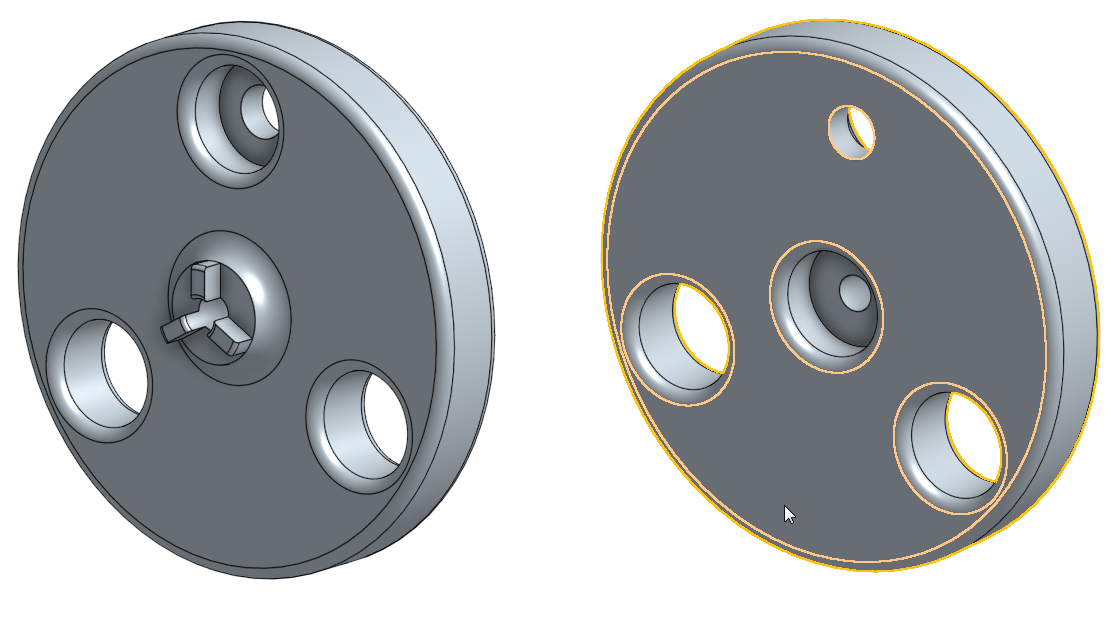
 兩個圓輪接起來可以正確傳動孔位置(60度),不會因為摩擦力而造成角度篇小或偏大
兩個圓輪接起來可以正確傳動孔位置(60度),不會因為摩擦力而造成角度篇小或偏大
onshape組裝
虎尾科技大學 機械設計系 40423116 李冠辰 - 仿生獸之軸連結器 from 40423116 on Vimeo.
目前已先3D列印第一組軸連接器
其他事情: 3D線材不夠必須要換3D材料時,必須先將噴頭預熱(設定是190度),預熱之後舊線材推入並拉出,目的是確實的把舊線材熔斷拉出,並推入新的線材,利用預熱噴頭出來的熔料來確認新線材是否裝好。
Comments
comments powered by Disqus