關於這門課用到的技術
選用的控制版子
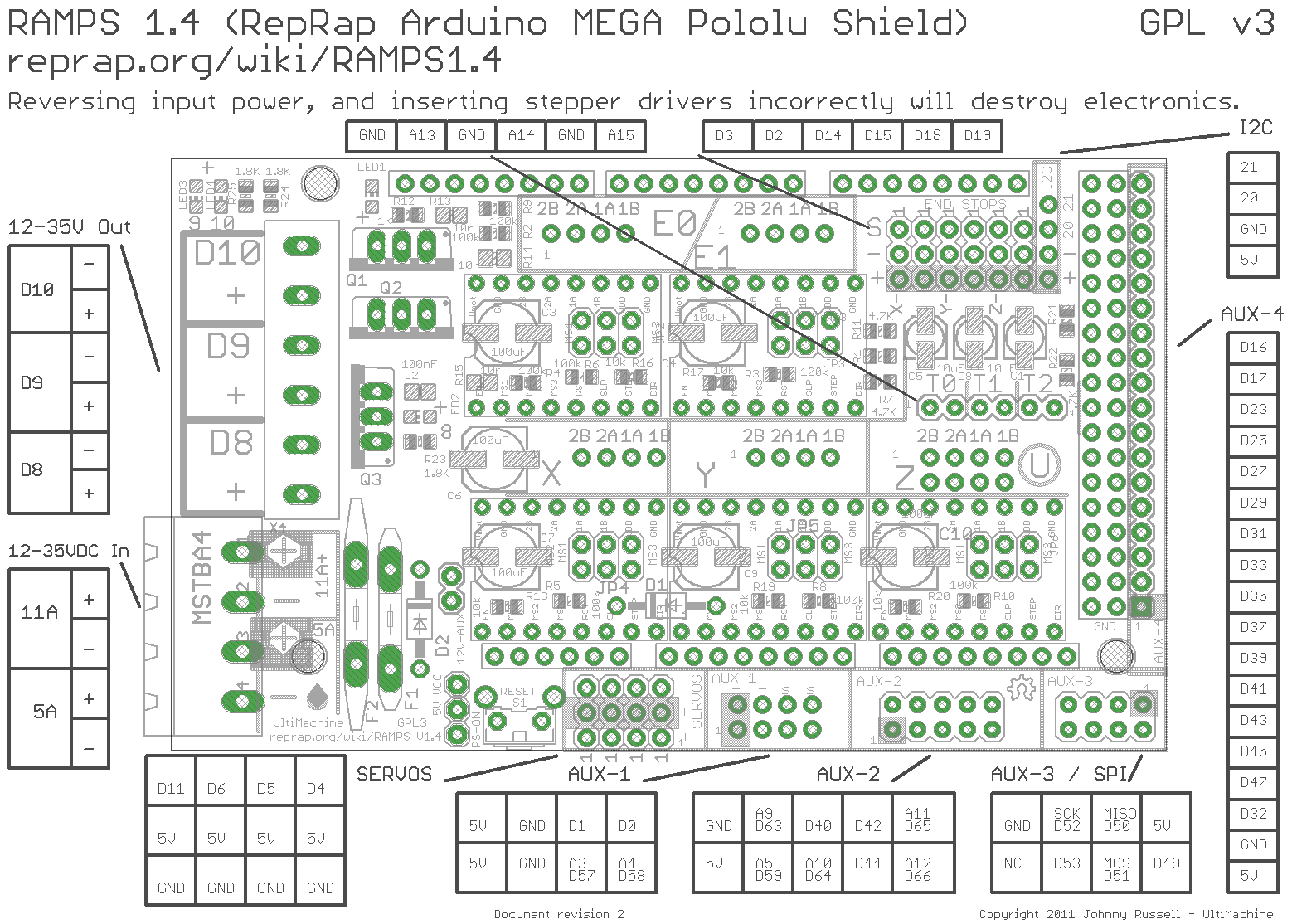
Arduino + Ramps 1.4 + power supply

pin mapping
Onshape 主體設計
這個再設計上有許多先天上的失誤,請不要直接使用,再傳動的部份需要額外思考,這一個月會再畫一個可以正常工作的三軸機器。
程式碼設計的部份
幾個要注意的地方
- 1.A4988控制晶片的方法
- 2.步進馬達的使用
- 3.對於控制版的腳位要查表
- 4.對於電路有基本的理解
A4988 & 步進馬達
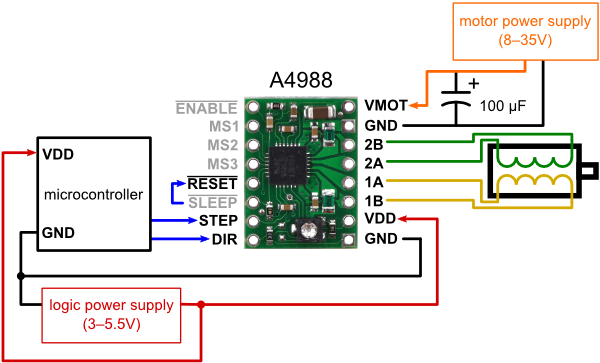
會需要控制step以及dir的腳位,dir的腳位決定正轉反轉假設輸入high為正轉那low就是反轉。
step腳位決定這個馬達要走幾步,譬如說我配的皮帶輪齒數是20齒的,我步進馬達轉一圈假設是3200步,我的一齒可以帶動皮帶移動1mm,寫個簡單的數學式子就會變成底下這樣。
$$\theta_T = cos^{-1}(\frac{x^2+y^2-L1^2-L2^2}{2\times L1\times L2})$$
$$\frac{20}{3200}=\frac{1}{x}$$
$$x=\frac{3200}{20}\times 1mm$$
$$x=160step$$
我要移動1mm需要多少步數
這對後面機器的校正也會用到,假設說讓機器移動10mm可是卻只移動一半,表示step少一半,再補正回去就可以讓機器正常運轉。
控制版腳位
這塊版子再當初設計的時候加入了許多可以讓使用者字定義的部份,預留了analogread 以及digital output再aux的部份,讓使用者自行對他定義和使用,我們這次有使用到一顆Servo來夾取一枝筆,當作Z軸使用,再查詢腳位花了一些時間,直到後來才發現左下角,作者有預留給大家使用,分別式D4、D5、D6、D11這4個腳位使用,切忌物將地線和火線接相反。
腳位的部份我都已經定義好了,可以直接使用。

後面想要加的東西
想要做一個端口,將可以利用python做介面來進行裡面和外面同時可以控制,內部可以先模擬完外面再進行執行。機構再從新想一個,這個問題有點多沒有考慮到。
Comments
comments powered by Disqus