- Pyslvs 中的三角形表示式
- Python 版本的原始碼
Pyslvs 三角形表示式
為了達成機構路徑的模擬,以符合 PMKS 所能模擬的接頭種類,Pyslvs 採用三種幾何解法:
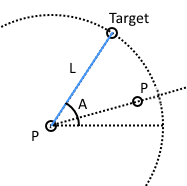
- PLA(P):透過兩個(或一個)已知點、基準點至目標點距離,及其(與水平線)的夾角,可以求得目標點座標。
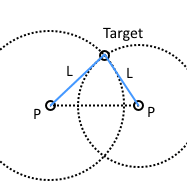
- PLLP:透過兩個已知點、兩基準點至目標點距離,可以求得目標點座標。
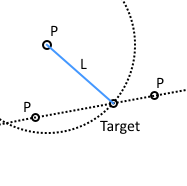
- PLPP:透過一個已知點、基準點至目標點距離、已知兩點連成的直線,可以求得目標點在直線上的座標。
PLAP
PLLP
PLPP
表示式
Pyslvs 使用函式解題的表示法如下:
Function[parameter0, parameter1, parameter2, ...](Target); ...
當透過輸入端求解之後,可以透過解出的目標點繼續求解。
例如,一個四連桿機構可以透過三個函式求解:
#Known: a0, P0, P2, L0, L1, L2, L3, L4 PLAP[P0, L0, a0](P1); PLLP[P1, L1, L2, P2](P3); PLLP[P1, L3, L4, P3](P4)
原始碼
這裡提供 Cython 的輸入輸出類型與 Python 版本的運算方法。
PLAP
tuple PLAP(Coordinate A, double L0, double a0, Coordinate B=0, bool inverse=false);
def PLAP(A, L0, a0, B=None, inverse=False):
"""Point on circle by angle."""
a1 = atan2(B.y - A.y, B.x - A.x) if B else 0
if inverse:
return (A.x + L0*cos(a1 - a0), A.y + L0*sin(a1 - a0))
else:
return (A.x + L0*cos(a1 + a0), A.y + L0*sin(a1 + a0))
PLLP
tuple PLLP(Coordinate A, double L0, double L1, Coordinate B, bool inverse=false);
def PLLP(A, L0, L1, B, inverse=False):
"""Two intersection points of two circles."""
dx = B.x - A.x
dy = B.y - A.y
d = A.distance(B)
#No solutions, the circles are separate.
if d > L0 + L1:
return (nan, nan)
#No solutions because one circle is contained within the other.
if d < abs(L0 - L1):
return (nan, nan)
#Circles are coincident and there are an infinite number of solutions.
if (d == 0) and (L0 == L1):
return (nan, nan)
a = (L0*L0 - L1*L1 + d*d)/(2*d)
h = sqrt(L0*L0 - a*a)
xm = A.x + a*dx/d
ym = A.y + a*dy/d
if inverse:
return (xm + h*dy/d, ym - h*dx/d)
else:
return (xm - h*dy/d, ym + h*dx/d)
PLPP
tuple PLPP(Coordinate A, double L0, Coordinate B, Coordinate C, bool inverse=false);
def PLAP(A, L0, B, C, inverse=False):
"""Two intersection points of a line and a circle."""
line_mag = B.distance(C)
dx = C.x - B.x
dy = C.y - B.y
u = ((A.x - B.x)*dx + (A.y - B.y)*dy) / (line_mag*line_mag)
I = Coordinate(B.x + u*dx, B.y + u*dy)
#Test distance between point A and intersection.
d = A.distance(I)
if d > L0:
#No intersection.
return (nan, nan)
elif d == L0:
#One intersection point.
return (I.x, I.y)
#Two intersection points.
d = sqrt(L0*L0 - d*d) / line_mag
dx *= d
dy *= d
if inverse:
return (I.x - dx, I.y - dy)
else:
return (I.x + dx, I.y + dy)
Comments
comments powered by Disqus