Pyslvs v0.9 大更新進度
- PMKS 轉換式更新
- 機構範例
PMKS 轉換式更新
完成滑動接頭 P 與 RP 的轉換式,已經可以支援這兩種接頭的輸入。
另外改進了三點共線和共點在 Solvespace 輸入的錯誤。
機構範例
增加了兩個範例,用作測試上述程式。
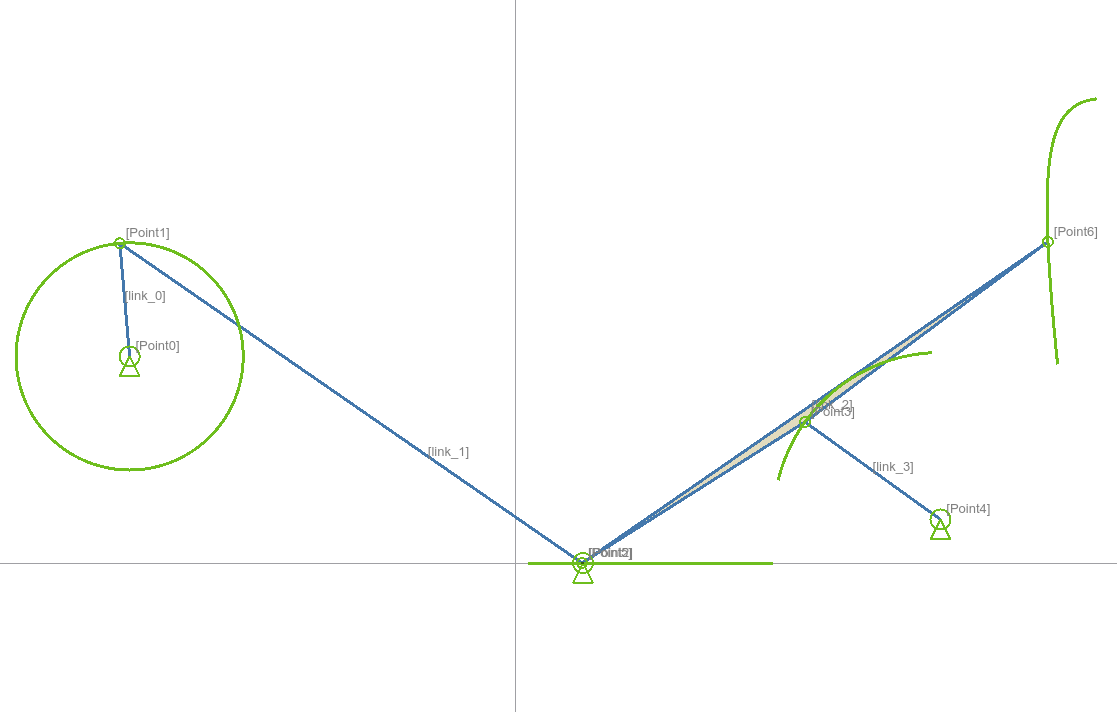
曲柄滑塊
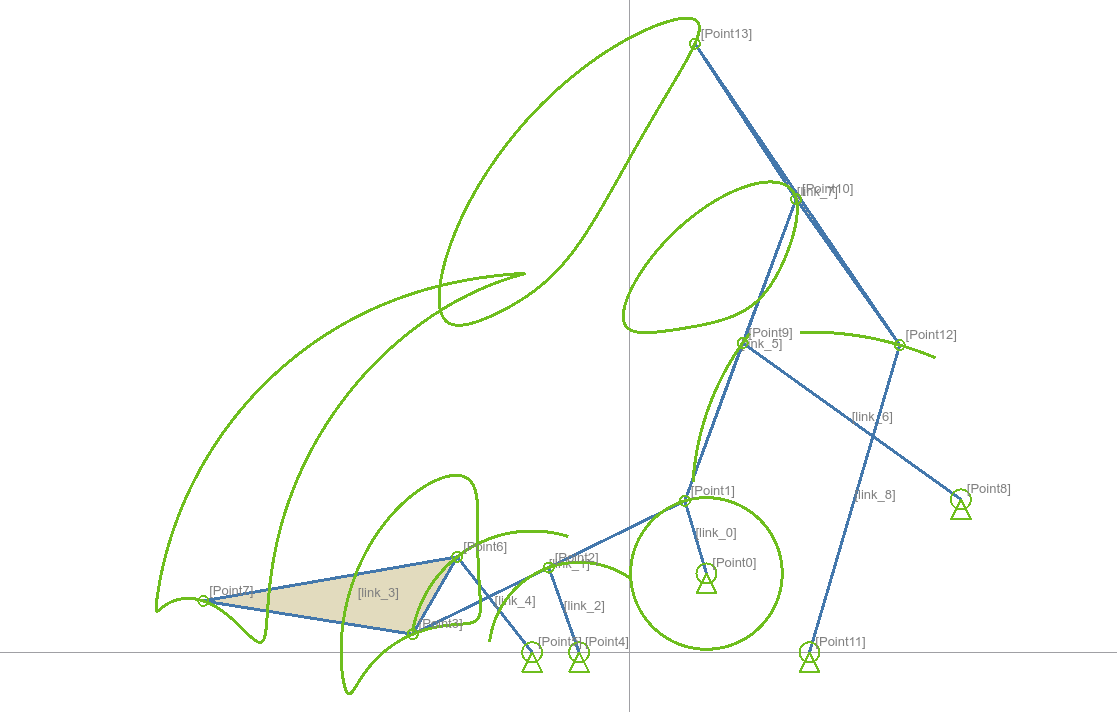
雙臂接球機構
Pyslvs v0.9 大更新進度
完成滑動接頭 P 與 RP 的轉換式,已經可以支援這兩種接頭的輸入。
另外改進了三點共線和共點在 Solvespace 輸入的錯誤。
增加了兩個範例,用作測試上述程式。
曲柄滑塊
雙臂接球機構
Comments
comments powered by Disqus