Pyslvs v0.9 大更新進度
- PMKS 的滑塊語法
PMKS 的滑塊語法
PMKS 的滑塊接頭有 P 和 RP 兩種,差別在於是否有滾動限制。
Pyslvs 這裡的困難點就是要將此表示法輸入 Solvespace 中。
由於是滑動的自由度,必須記錄和回傳兩個點座標,分別是接頭和滑槽的。
如果是接地的,還容易設計,因為其中一端只需要 dragged 約束和水平線夾角即可,但是如果都在搖桿上,滑槽的夾角是相對於搖桿的,就不易解決了。
先用 RP 接頭做測試,並模仿 PMKS 的拓樸法輸入。
語法
這次使用連桿數 3 的機構模擬:(PMKS Server)
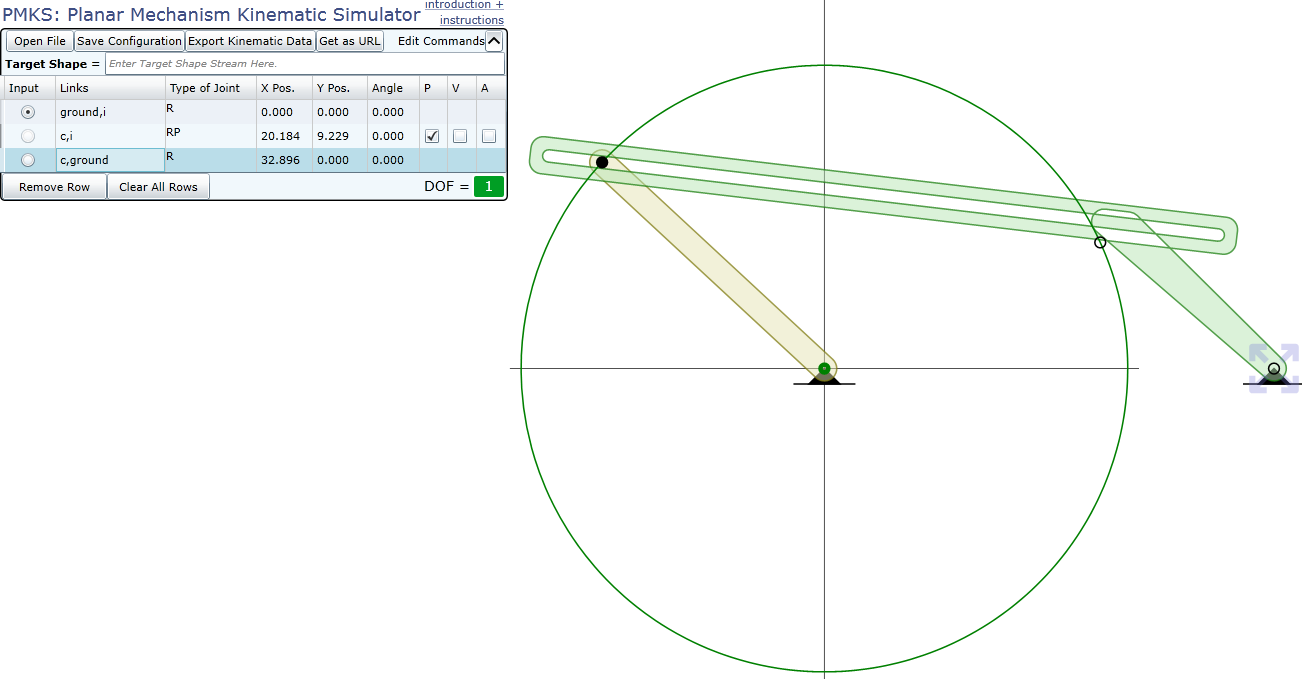
當 Type of Joint 屬性為 RP 時,會根據 Links 屬性進行判別,第一個 Link 會當作滑槽所在的連桿,因此上圖的 c, i 表示滑槽在 c 連桿上,i 或之後的連桿則會通過銷連接在滑槽上。
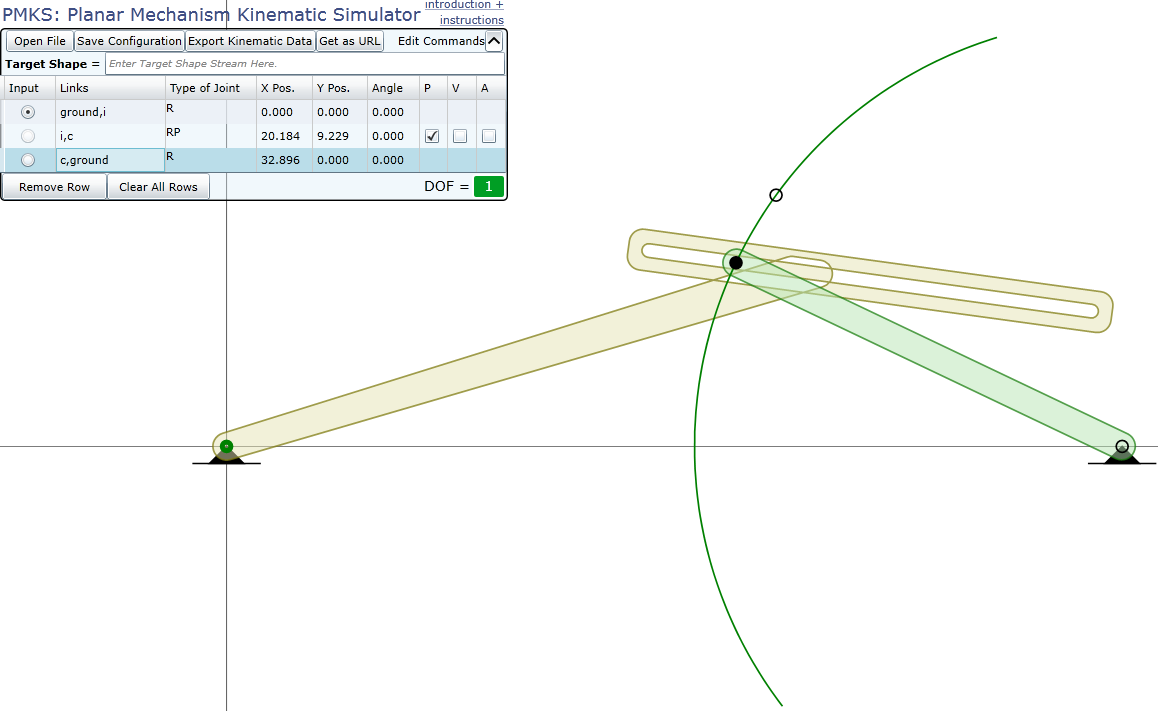
若相反,則會如下圖:(PMKS Server)
第一張圖的接頭在 Solvespace 中模擬如下:
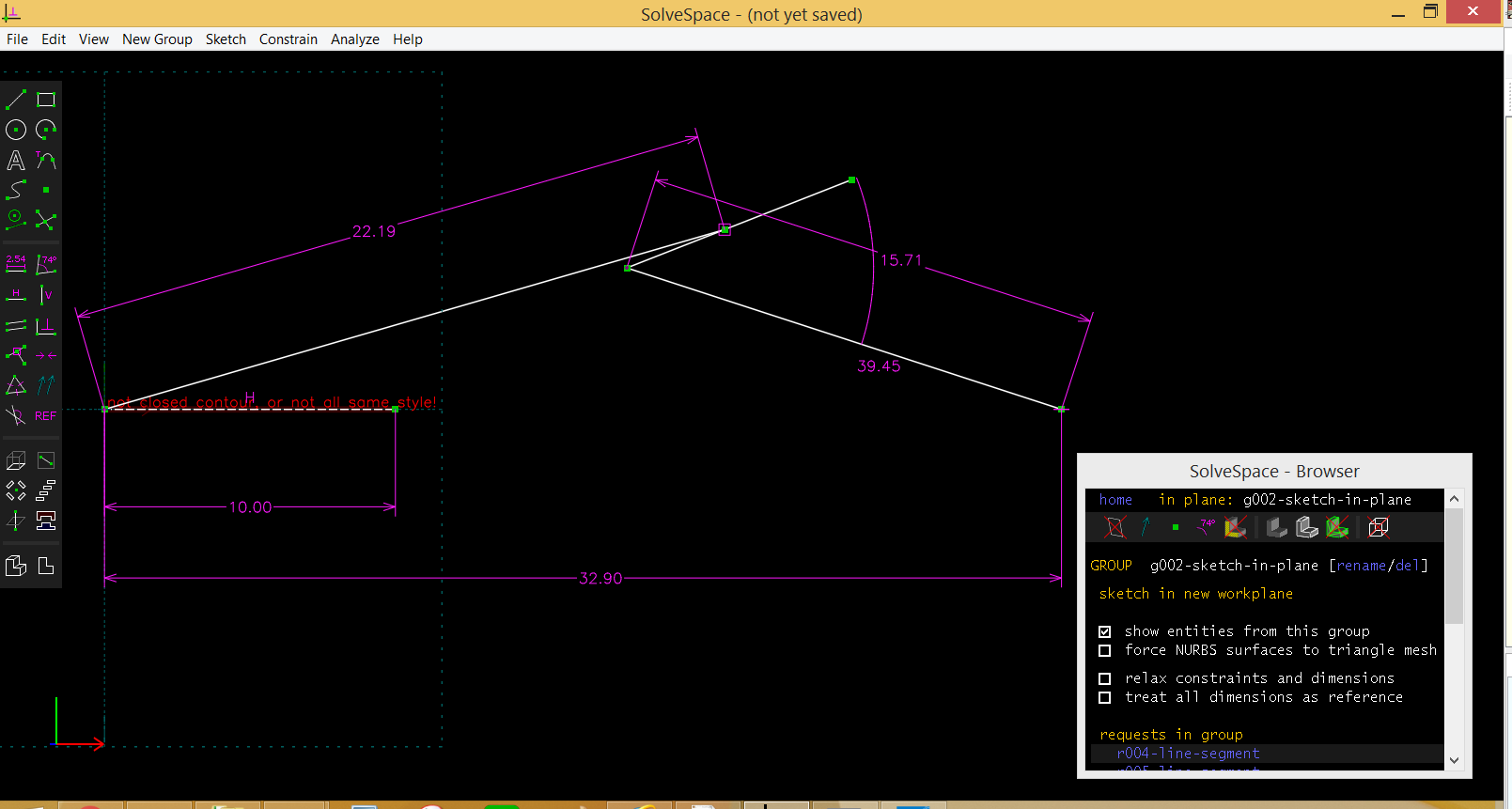
接頭處,以一固定角度的直線取代滑槽的位置,角度為絕對角度和接頭位置計算得出 (15.71 度)。
圖面上必須呈現滑動點和滑槽的位置,因此 Pyslvs 必須記錄不同桿件上的 Current position 數據。
預計這幾天可以完成靜態的輸入。
Comments
comments powered by Disqus