每星期創意性機構設計課程筆記整理
- 類型合成
- 自由度
- 心得
類型合成
類型合成 (Type Synthesis) 的合成對象是「機構類型」,機構類型可以透過如下參數定義:
- Degree of Freedom 自由度 (Dof)
- Number of Link 桿件數 (NL)
- Type / Number of Joint 接頭種類 / 接頭數 (J)
其中桿件數 (NL) 和接頭 (J) 可以求得自由度 (Dof),這在下一小節會提到。
機構類型並不包含接點位置或連桿長度等數據,僅僅是代表這種機構的特色,如輸入端、連桿與不同接頭的數量。
舉例來說,曲柄搖桿是四連桿尺寸的一種,桿件數為 4,有 4 個旋轉接頭;平行四連桿、雙搖桿或雙曲柄也是如此,它們即為同一種機構類型。
泰奧.揚森 (Theo Jansen) 的八連桿雖然作動上與四連桿相似,不過桿件數為 8,10 個旋轉接頭,並不屬於同一種連桿。
類型合成的目的在於從現有的存在設計 (Exist Design) 跳脫成新設計 (New Design),以取得新的專利 (patent)。
自由度
以數學模型的角度,自由度 (Degree of Freedom) 是連桿組的獨立變數的數量。換而言之,當給定輸入端的數目,可以得到此連桿組狀態的唯一解。
連桿組一般稱為運動鍊 (Kinematic chain),當其中一個桿件作為機架(主座標系)時,此連桿組可謂拘束化 (Constrained),稱為機構。
平面系統
平面系統中,物體的全自由度為 3,為 x、y 座標的增量與 z 軸的旋轉量,當配合接頭後,會將各桿件的自由度減少。
$$Dof=3(N_{L}-1)-2\times{J_{R}}-2\times{J_{P}}-1\times{J_{G}}-1\times{J_{RP}}$$
首先將各桿件的全自由度相加,接著將各種接頭失去的自由度減去。
- R 為旋轉對,失去平移的自由度,因此扣 2。
- P 為滑動對,失去旋轉與單方向移動,因此扣 2。
- G 為齒輪對,為旋轉與滑動,失去單方向移動,因此扣 1。
- PMKS 的 RP 為槽中銷,為旋轉與滑動,失去單方向移動,因此扣 1。
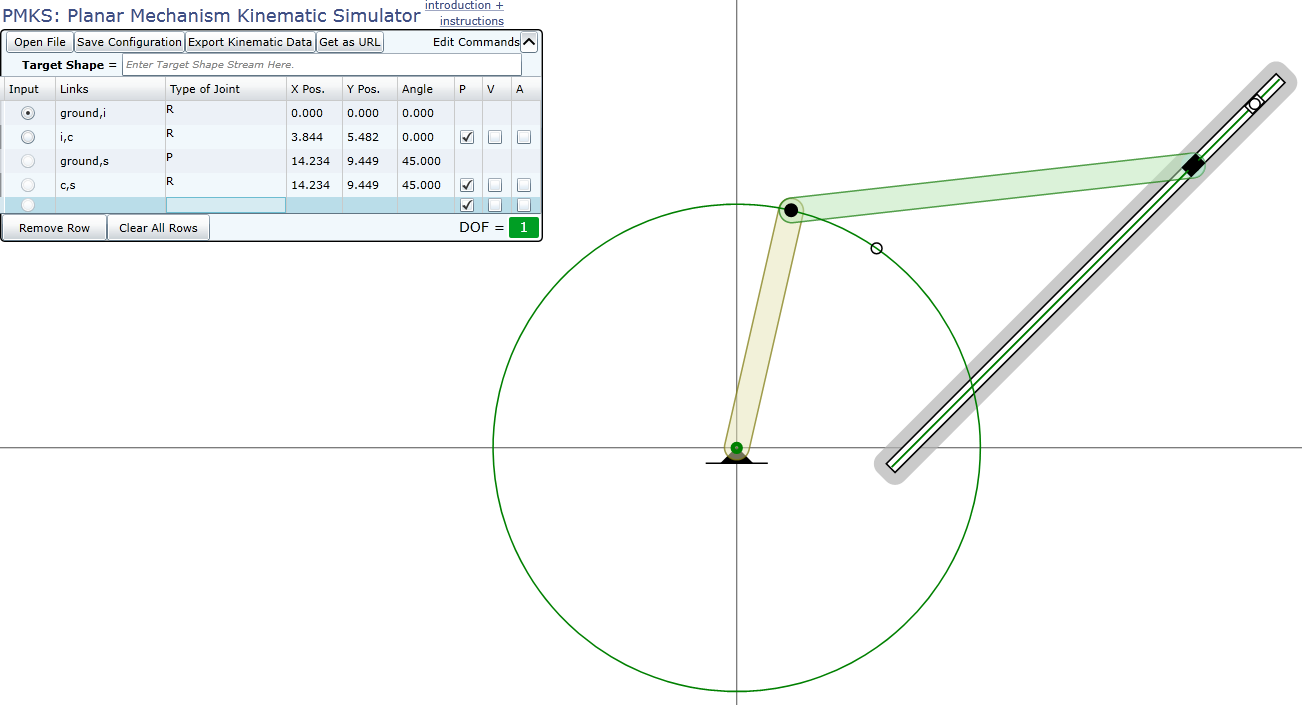
P 和 RP 的差異在於 P 多了一個滑塊,而滑塊屬於桿件,如圖所示:
下圖的桿件數為 4,R 接頭為 3 個,P 接頭為 1 個。(PMKS Server)
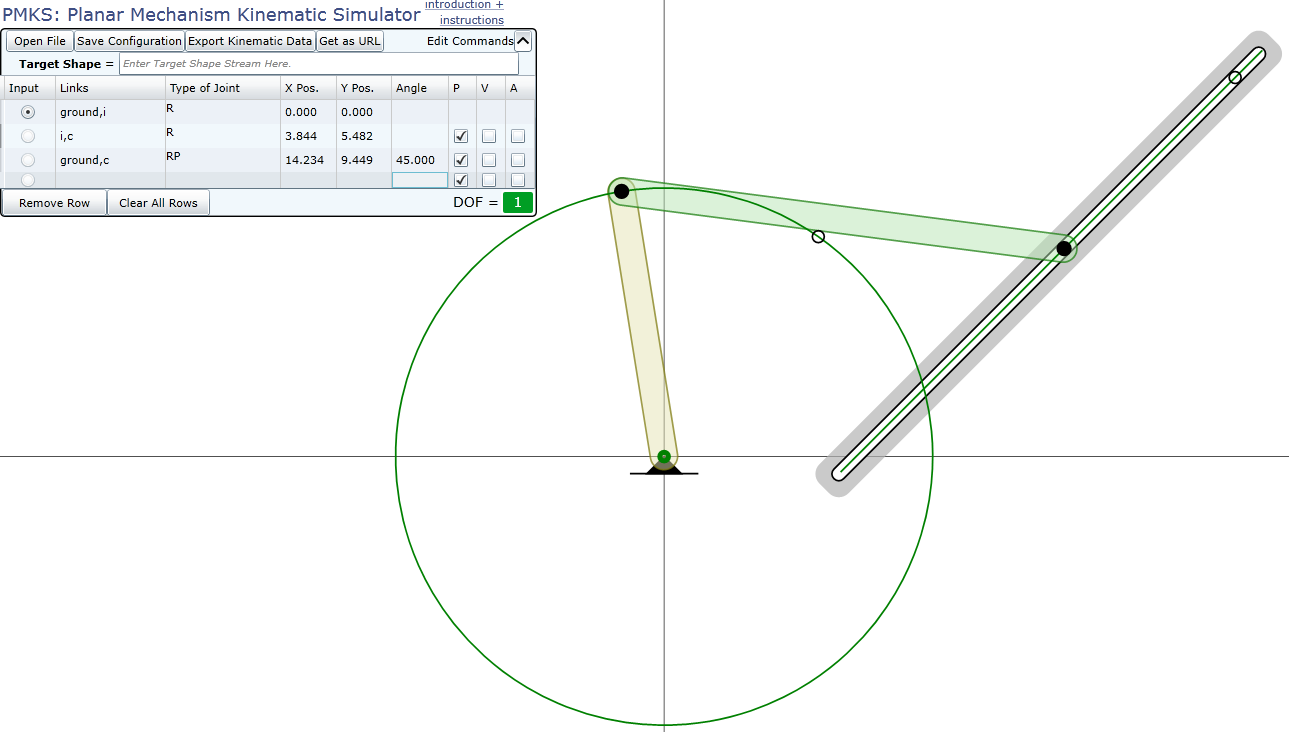
下圖的桿件數為 3,R 接頭為 2 個,RP 接頭為 1 個。(PMKS Server)
透過自由度可證,當自由度小於 1 時,會無法接收任何輸入。
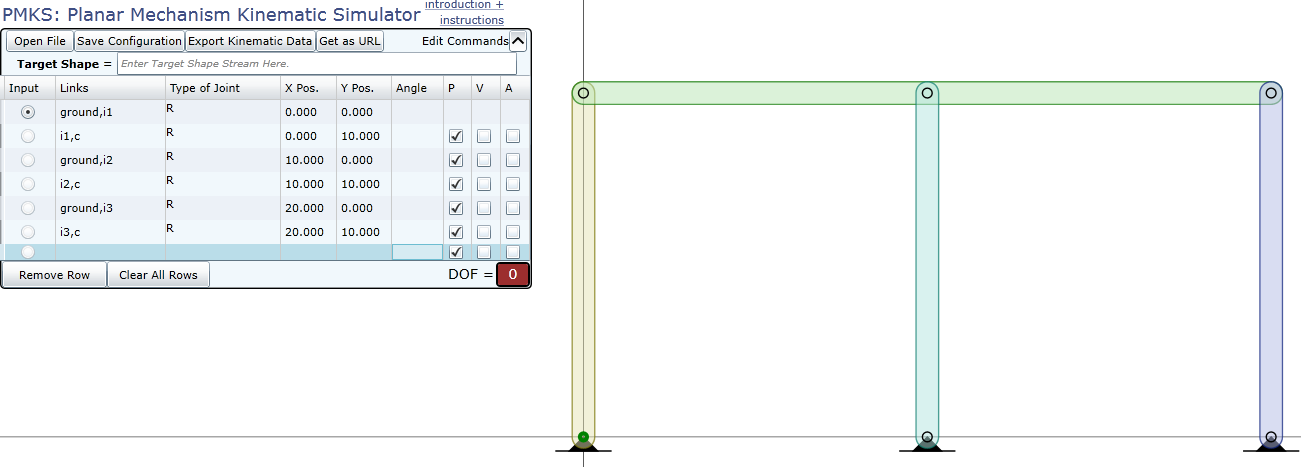
但是有些連桿雖然自由度低於 1,在某些情況下是可以使用的,例如平行搖桿:
下圖的桿件數為 5,R 接頭為 6 個。(PMKS Server)
Solvespace 這裡有時求的到解,有時會紅屏。
空間系統
空間系統的全自由度為 6,為 x、y、z 軸的增量與旋轉。
$$Dof=6(N_{L}-1)-5\times{J_{R}}-5\times{J_{P}}-3\times{J_{S}}$$
原本的接頭繼承自平面機構,因此 R 和 P 接頭只釋出 1 個自由度,其他接頭也是同理。
在空間系統中,還有更多樣的接頭:
- S 為球接頭 (Spherical),只有旋轉的 3 個自由度。
- 螺旋接頭,有兩種運動方式,但是彼此為相依關係 S(θ),因此自由度為 1,同 P 接頭。
當一桿件兩端皆為 S 接頭時,如 Delta 3D 列印機的連桿,會產生自轉,不過此自轉對整個系統是沒任何影響的,稱為贅餘 (Redundent) 自由度,計算時應當扣除。
如下面的 6 對史都華連桿計算,桿件數為 14,P 接頭為 6 個,S 接頭為 12 個:
$$Dof=6(14-1)-5\times{0}-5\times{6}-3\times{12}=6+6(自轉)$$
輸入為 6 個 P 接頭。
心得
排除特殊連桿,希望 Pyslvs 可以根據自由度的數量,讓使用者選擇從指定的接頭輸入,而 Path track 功能則變為 Solvespace 單純紀錄路徑的功能。
存下來的路徑,可以套用至以前的 demo 功能,類似錄製性的可以重新播放。
接頭輸入系統即為之前的 Drive shaft,可能需要重新設計,P 和 RP 接頭若也要接收輸入,則需規劃一下。
Comments
comments powered by Disqus