V-rep 與 Solvespace的結合應用
最近開了很多V-rep的範例檔來看 ,但都不太有收穫 ,為了避免浪費時間 ,回去找了之前老師提到的solvespace和vrep的共同運用 ,也因為要完成3D - Printer就要先了解基本觀念和用法 ,所以就抓了檔案來測試
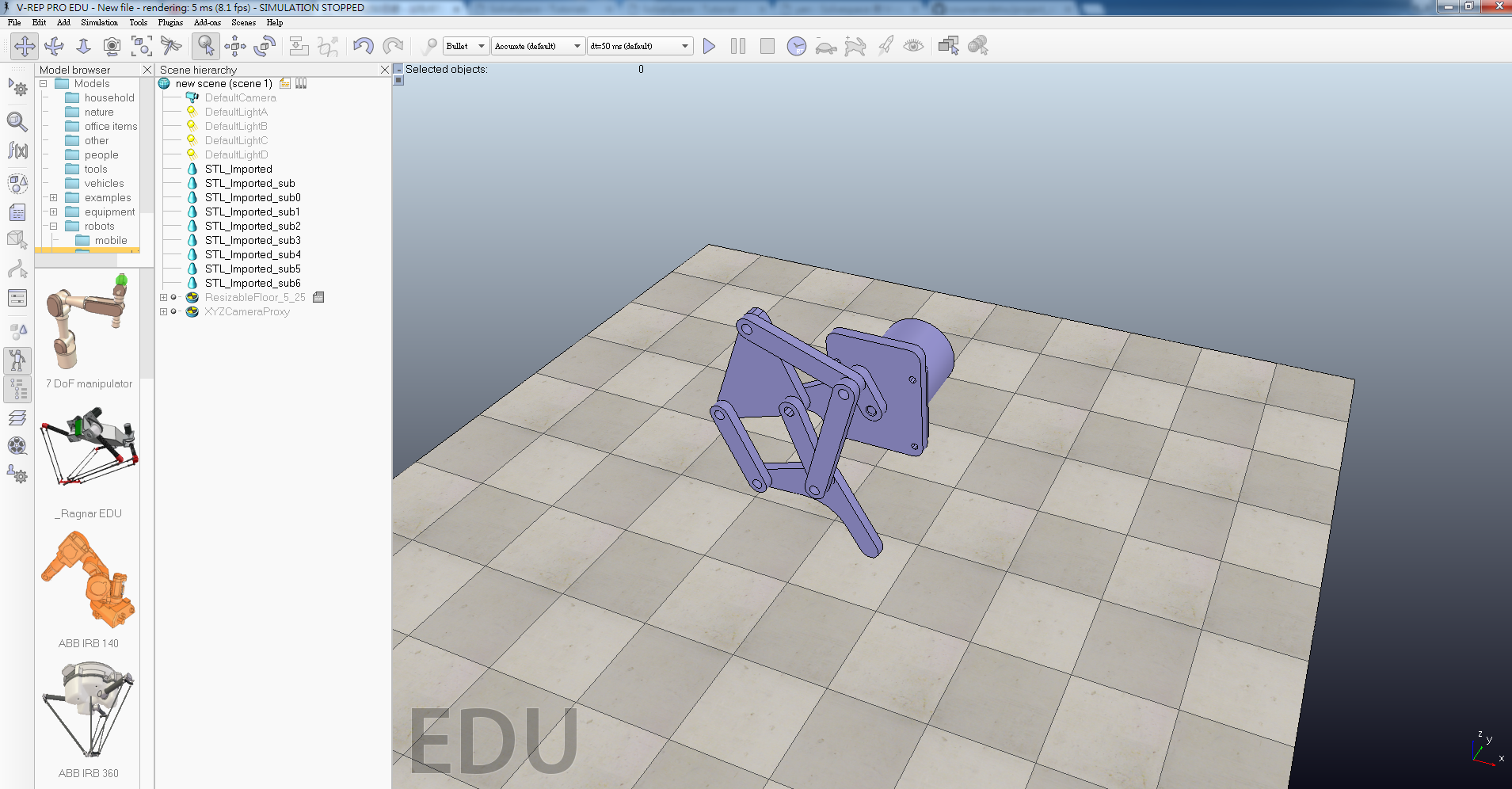
(檔案位於solvespace官網的 tutorial : linkages)
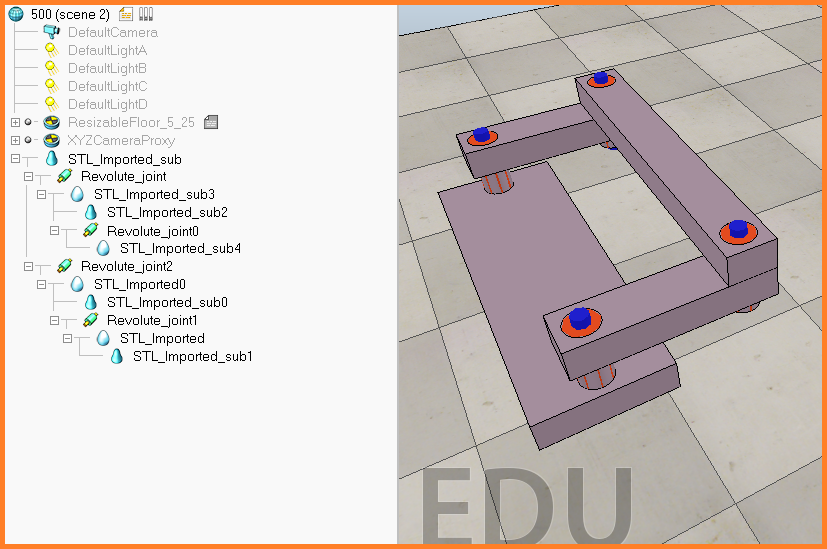
由於各零件之軸孔沒有軸連接 ,導致旋轉軸無法放置 ,所以我把軸都畫上去了 ,檔案為g2目錄下的solvespcae_vrep
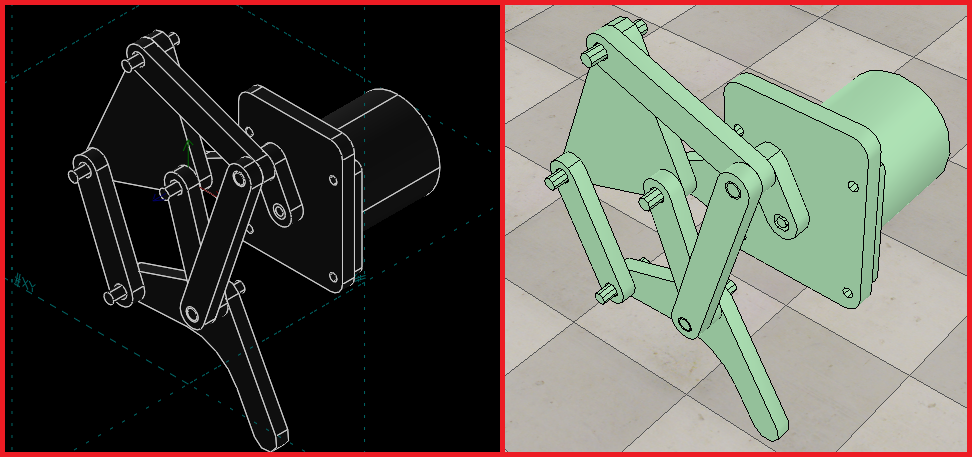
Solvespace的長料與除料功能真的不太習慣 ,很容易造成運算錯誤
軸都放好了 ,只是從屬關係還是不太清楚要如何放置
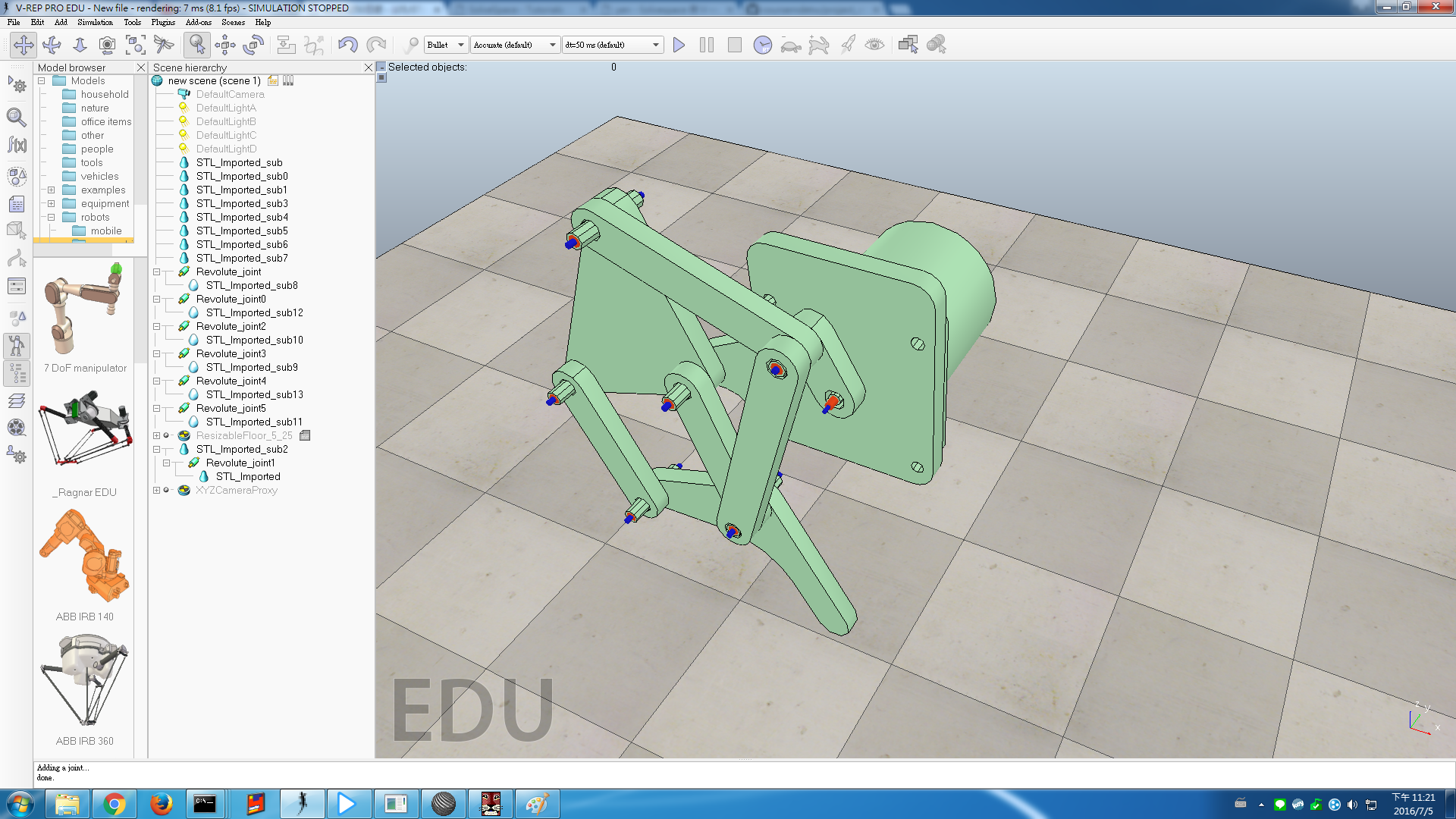
結果我又弄了一個圖 ,試圖從這邊學習從屬設定
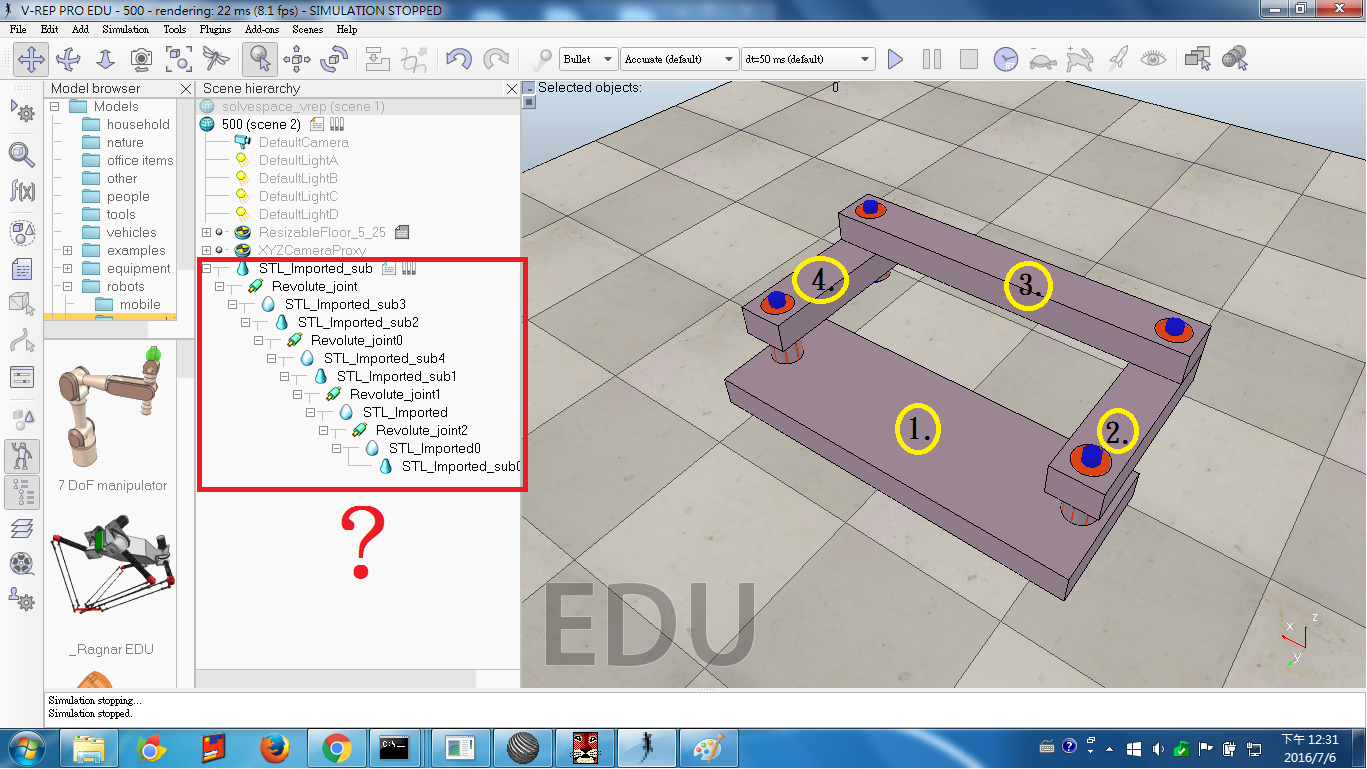
目前只會讓它亂轉
感覺和各個旋轉軸速度也有關係
105 - 07/10更新
現在能夠讓連桿旋轉了
想要測試能否以固定角度來回旋轉
但是要達到這樣的動作需要編寫程式 ,且還在研究script的類別以及revolute的type到底要用哪一種 ,這些花了很多時間...
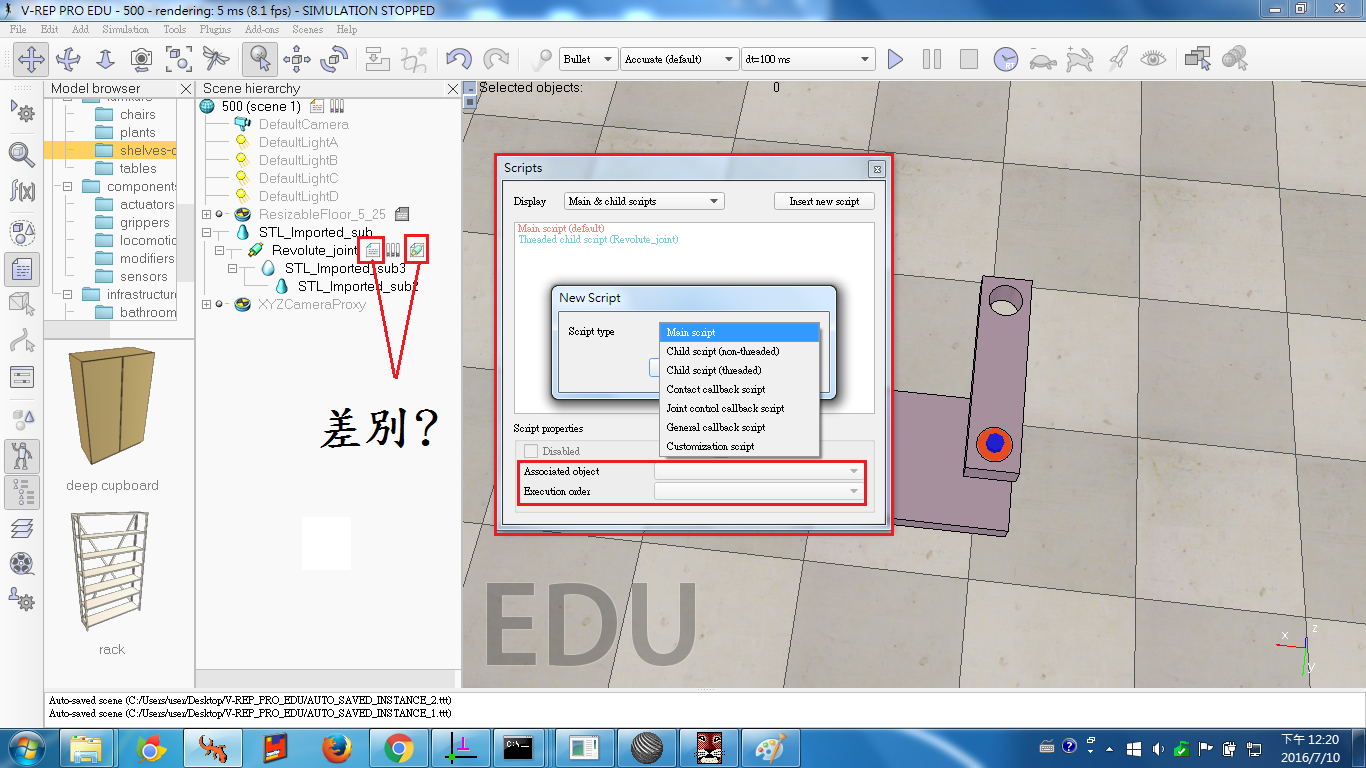
目前先以控單軸為主 ,但是遇到以下狀況
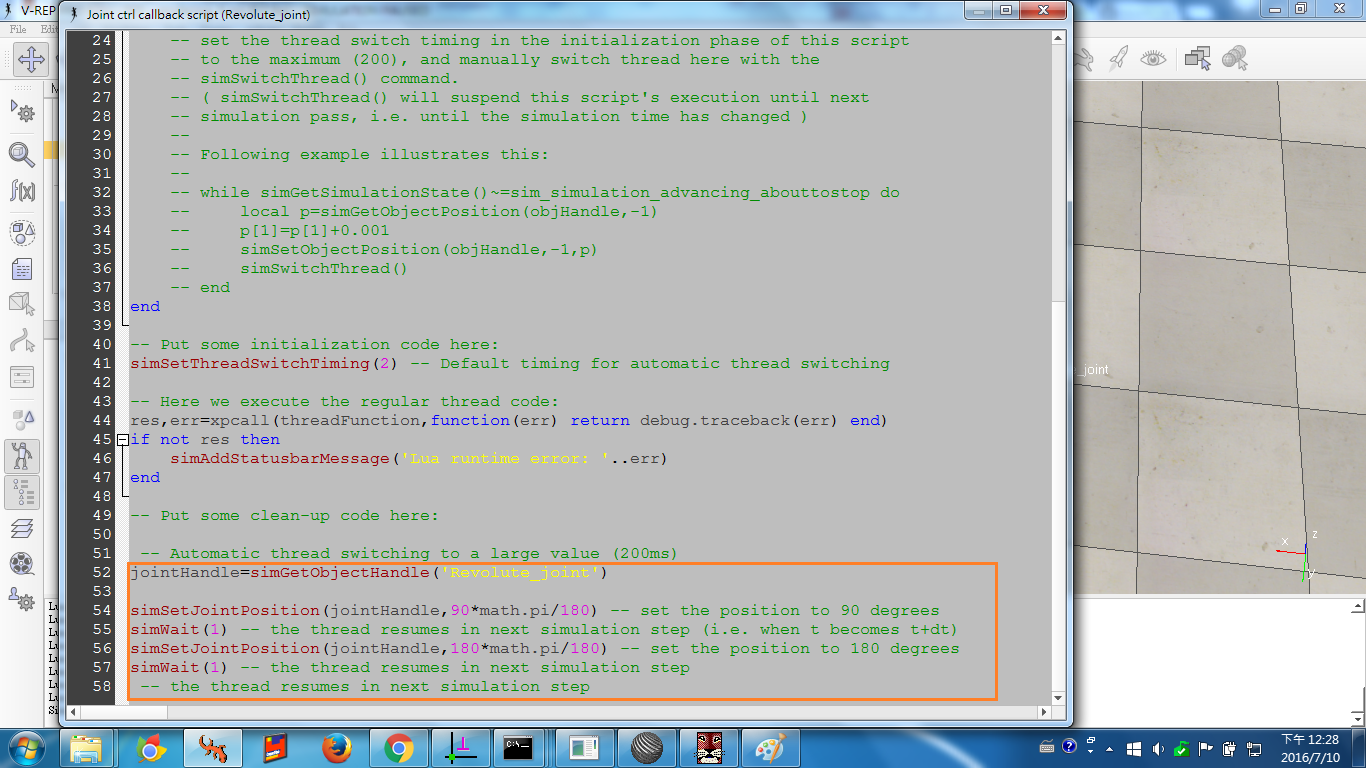

如果是用左邊的script就不會有simWait的錯誤 ,但是它只會走90度 ,然後simWait就不會動了
參考 :
105 - 07/11更新
Joint 種類分成以下4種 :
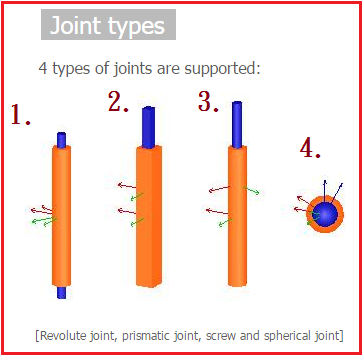
1. 為旋轉軸, 只有一個自由度 (旋轉), 用於一般旋轉軸。
2. 為平移軸, 只有一個自由度 (平移), 物體能沿著軸線做平移。
3. 為旋轉與平移軸的結合, 只有一個自由度, 能夠使物體沿著軸做旋轉移動, 如同螺絲。
4. 為球窩接頭, 有三個自由度, 用於類似關節的地方。
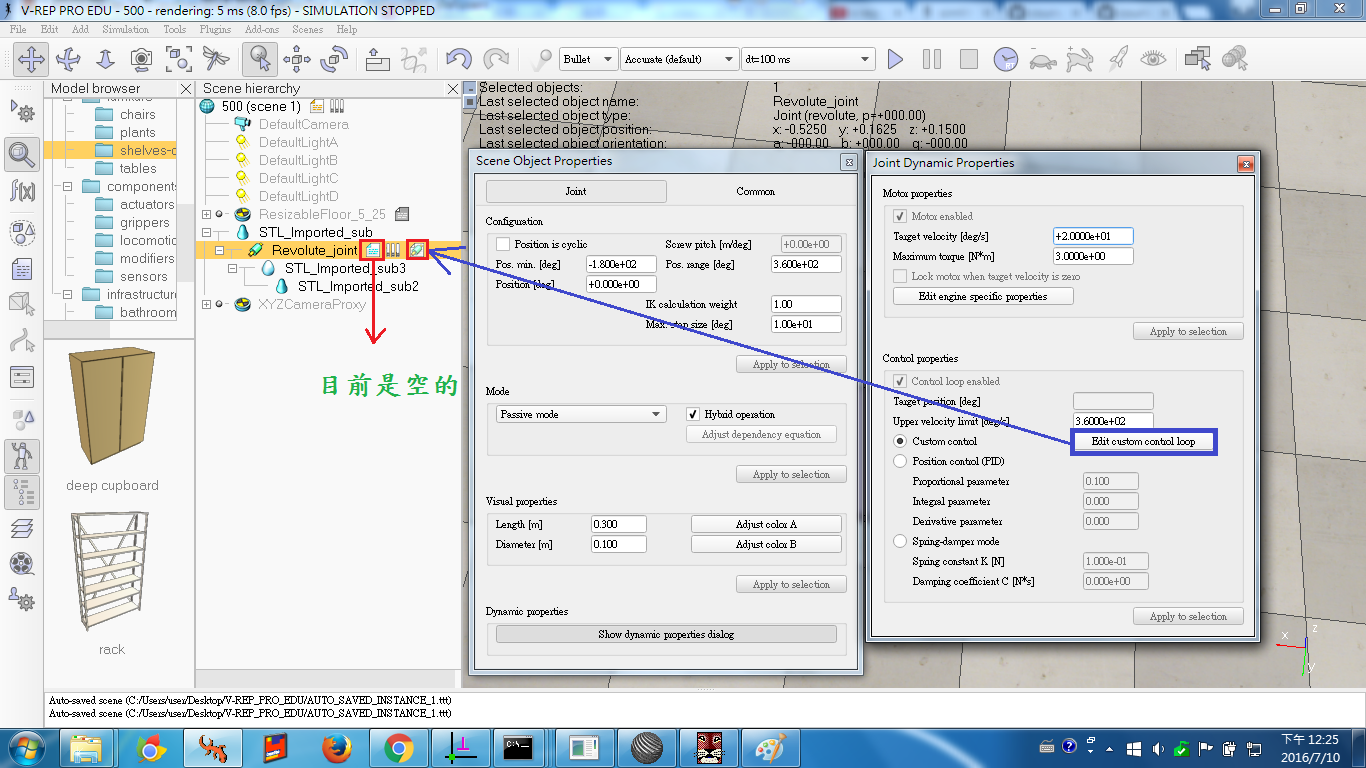
Control the joint :
1.simSetJointPosition : when your joint is not in force/torque mode
2.simSetJointTargetPosition : when your joint is in force/torque mode, its motor enabled and its control loop also enabled
3.simSetJointTargetVelocity : when your joint is in force/torque mode, its motor enabled, and its control loop NOT enabled
今天回去翻老師的信, 才發現裡面有四連桿的範例, 以下為測試:
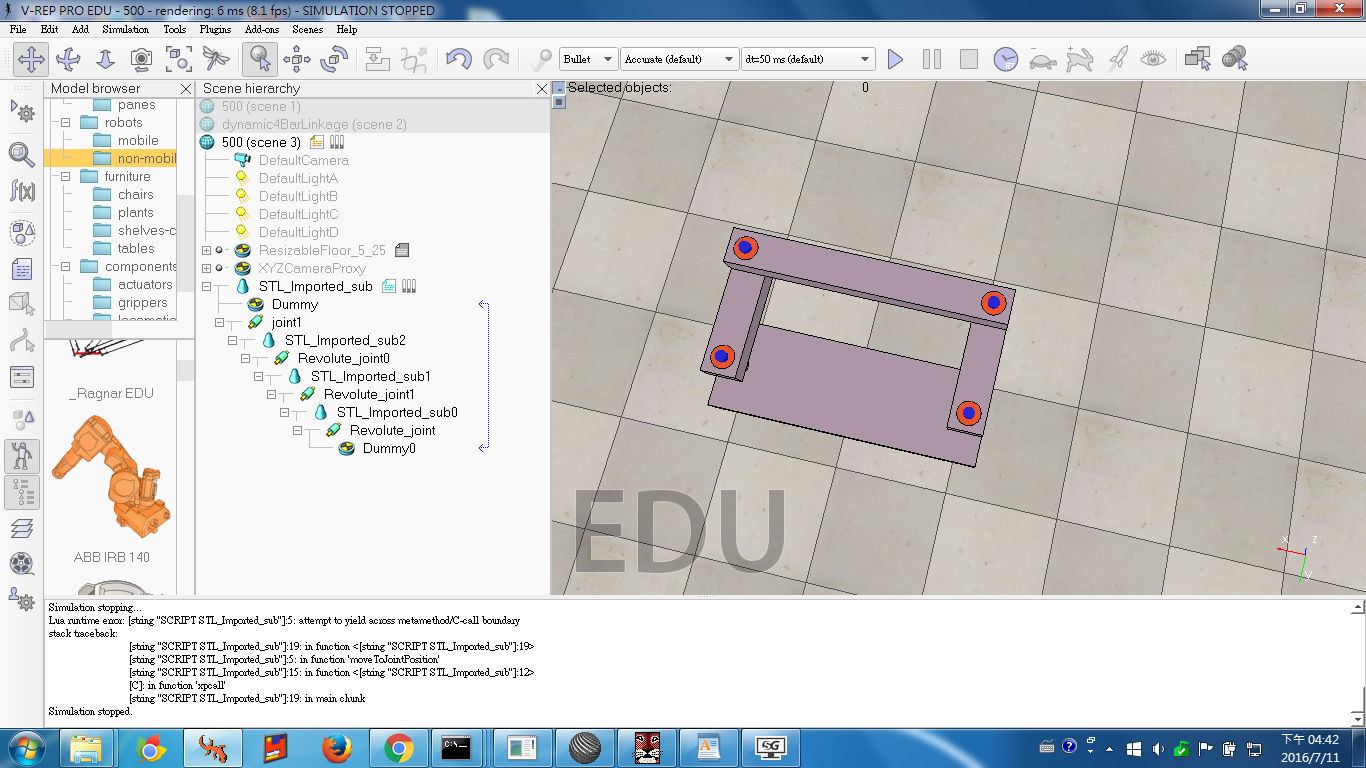
只要設定一個轉軸, 其他設定好就可以跟著一起做動, 但是在程式部分, if 條件還是不太懂, 很容易出現lua錯誤, 還有很多語法要理解。
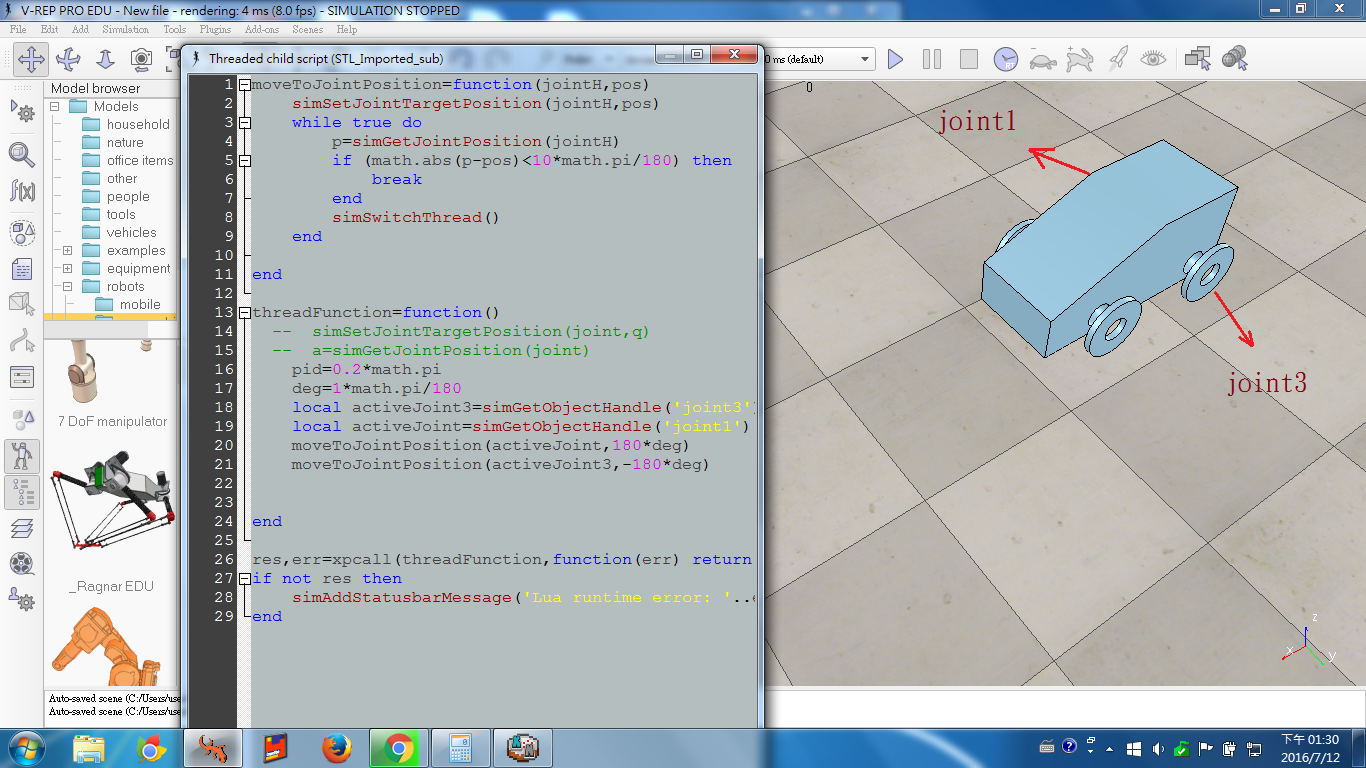
105 - 07/12更新
今天拿老師的程式去跑小車子 ,但是joint的角度只要定在360就跟0度一樣 ,要如何才能超過這個範圍還在思考...
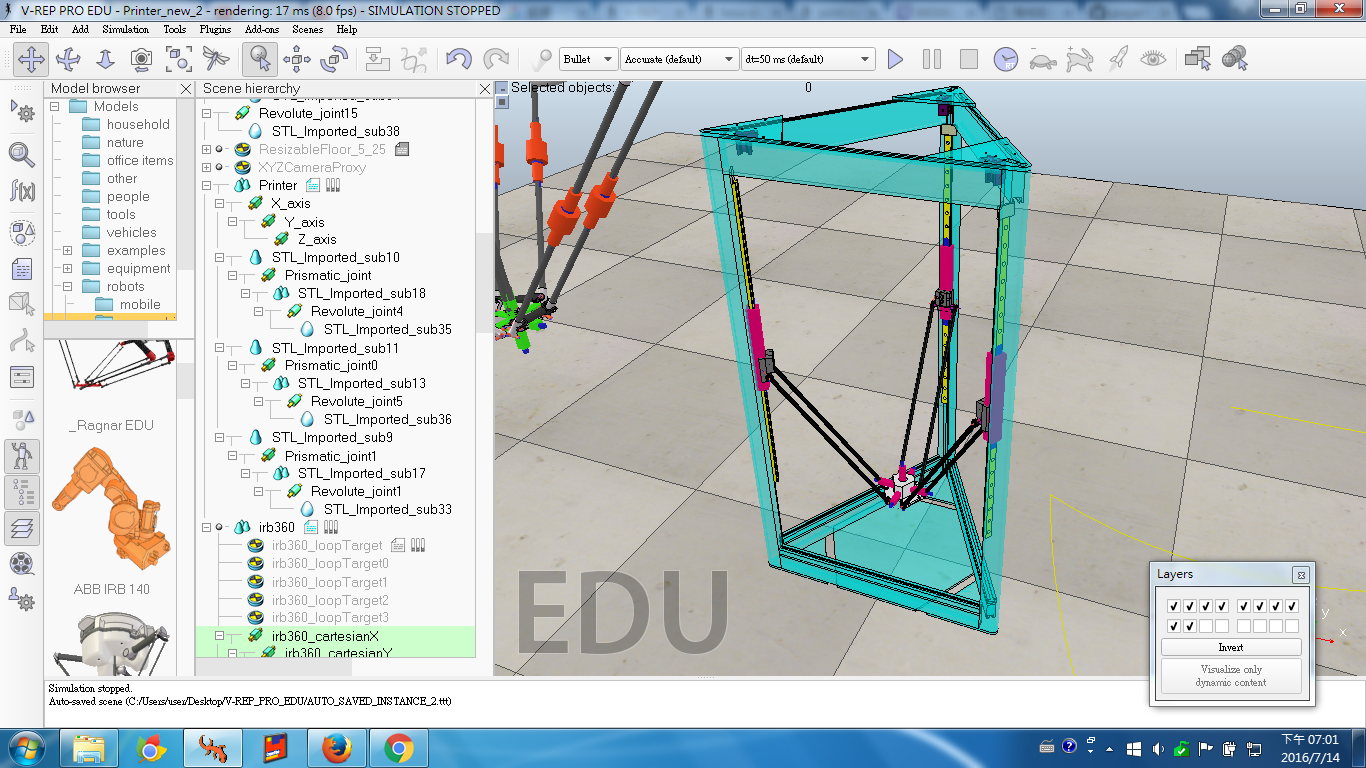
105 - 07/14更新
今天參照了irb360範例, 試著組了printer, 前面還算順利, 在中間的 close chain部分 還要加上重疊的Revolute 來限制移動, 最後再搭上dummy 應該就可以控制了
105 - 07/15更新
今天開始研究Inverse Kinematic 逆向運動學(IK) ,透過矩正及向量運算 ,就可以得到參數 ,且恰巧有學長論文和此相關 ,從中學到了不少 ,但還沒能弄懂 ,最後要結合進V-rep模擬中 ,腳步要加快了
105 - 07/17更新
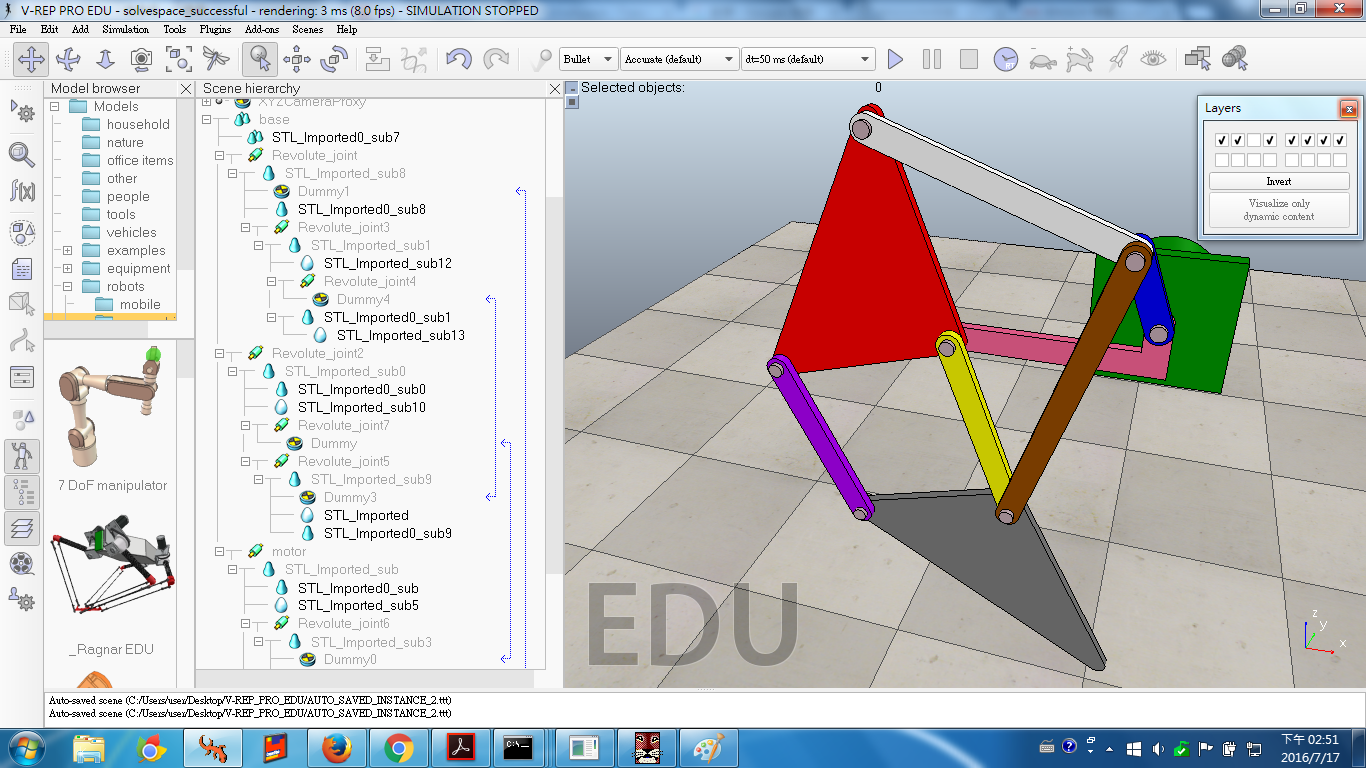
Solvespace測試連桿運動方式
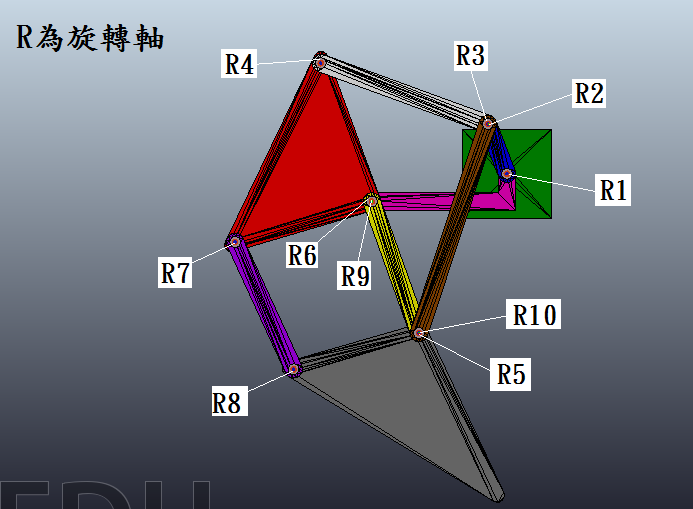
旋轉軸定義
子屬關係設定 (測試) ,加上dummy固定
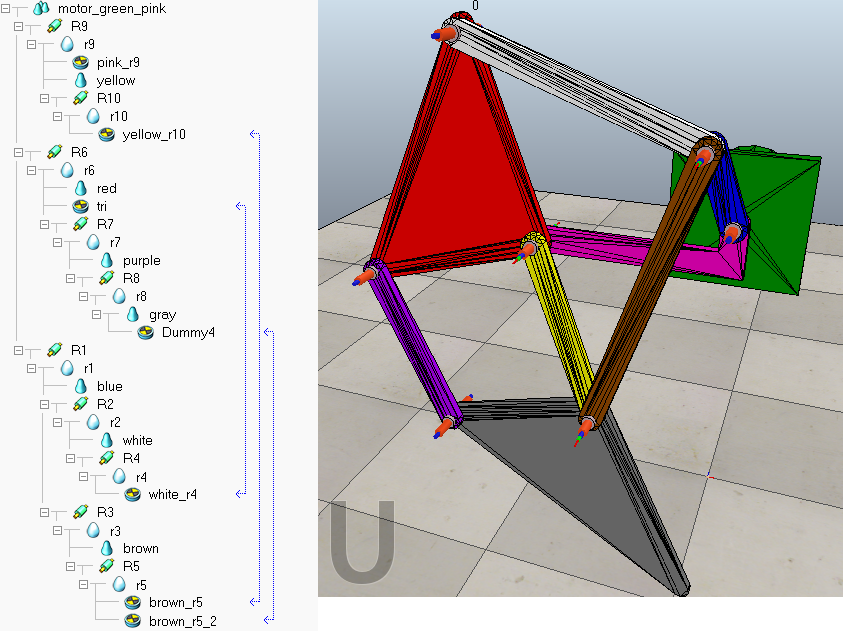
經過一番波折 ,終於和同學弄出來了 ,只要無法封閉的部分利用dummy固定就可以了 ,至於實體轉軸部分要搭接在桿子上才可以
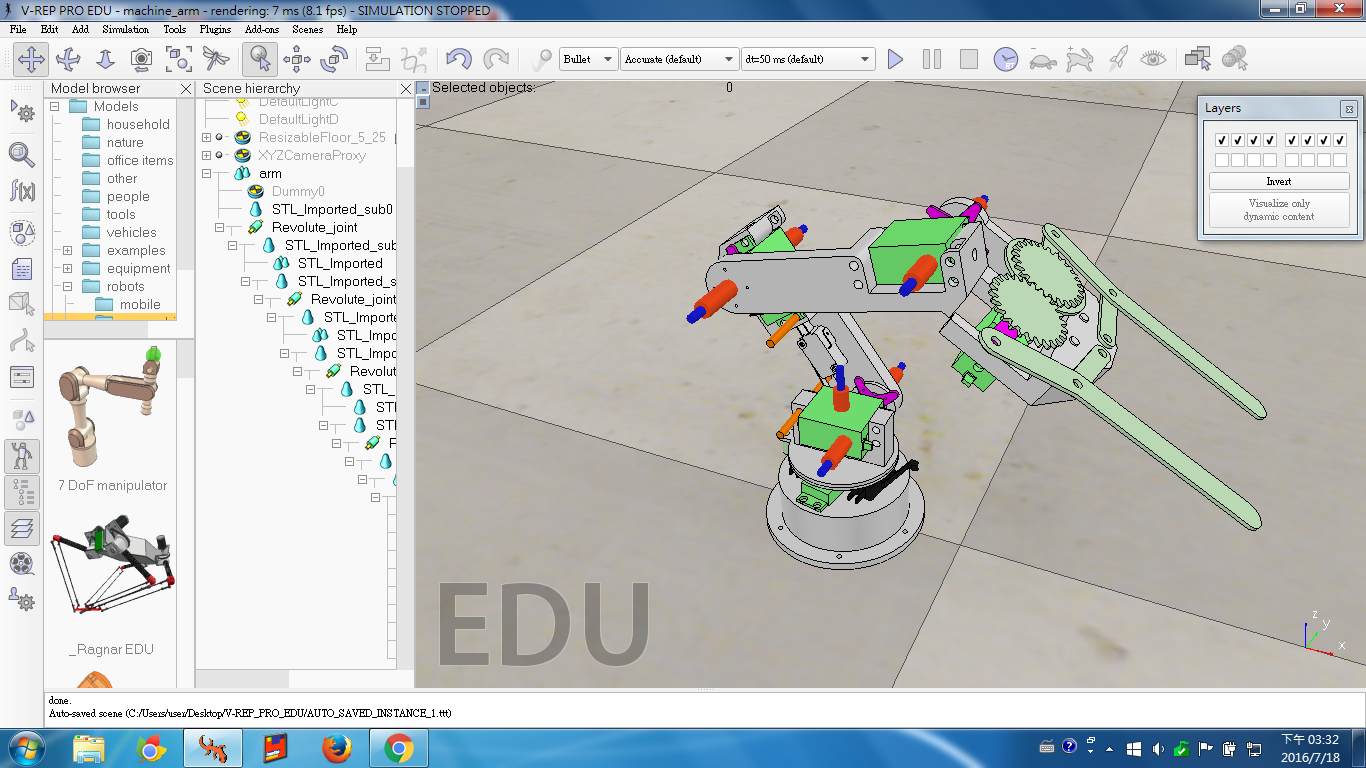
105 - 07/18更新
嘗試幫第一組 組裝手臂, 除了夾爪部分外 ,其餘都組裝好了 ,過程發現部分零件拆解後會有座標不對的問題 ,只要將做標調整和world相同就比較容易了
(參照範例: 7 DoF manipulator 設定ik值)
105 - 07/24更新
今天預計要測試馬達控制 ,但是沒有多的12V power supply ,所以先把Onshape ,printer的細部畫一畫 ,現在大概有300個特徵 ,本來可以輕鬆的拉動滑塊 ,現在要用箭頭才能拉動了 ,估計不會畫電路板部分 ,戲偶衣服穿太多了
105 - 07/28更新
暫時利用可變電阻取代步進馬達 ,並加入馬達轉軸 ,控制加熱頭移動
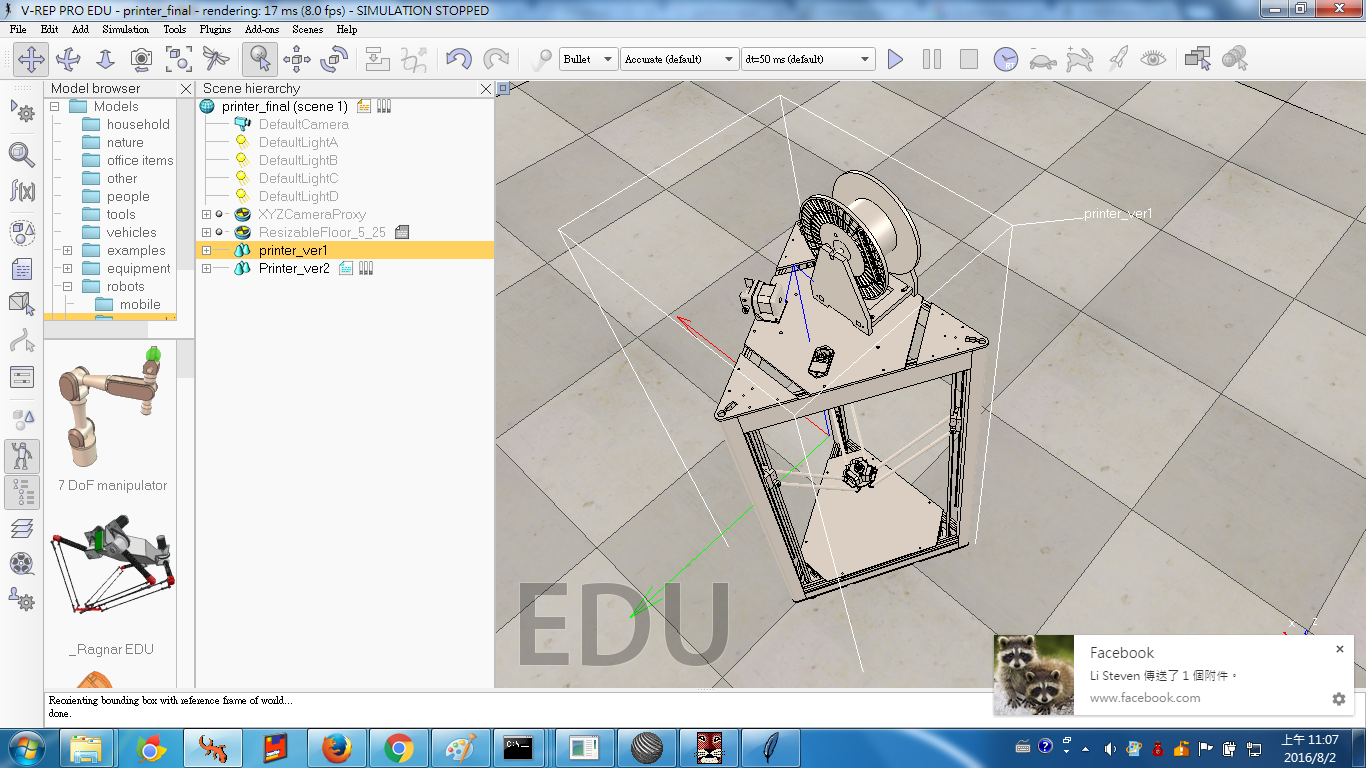
105 - 08/02更新
V-rep定位
在繪圖時 ,需要有一個對稱零件(輔助零件)在vrep內訂定位置 ,在定位之前 ,座標系要先調整
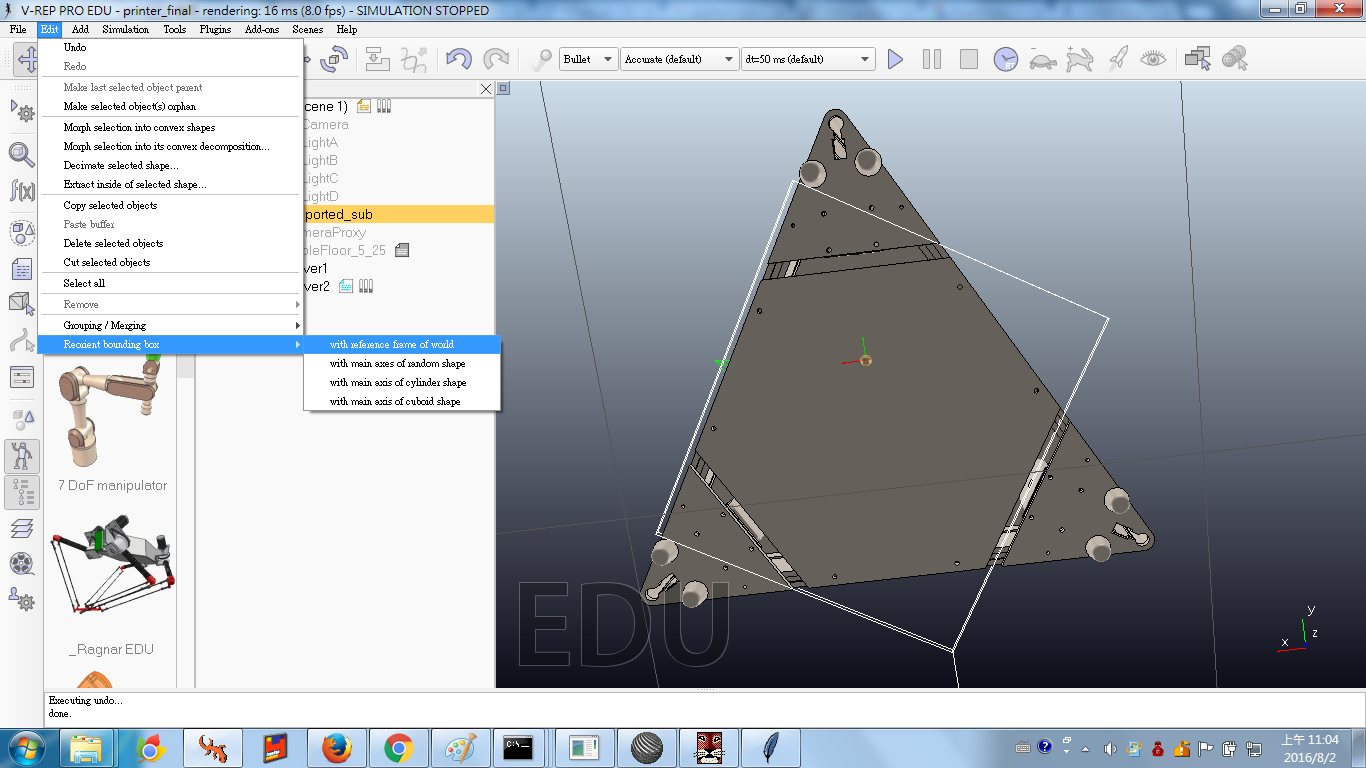
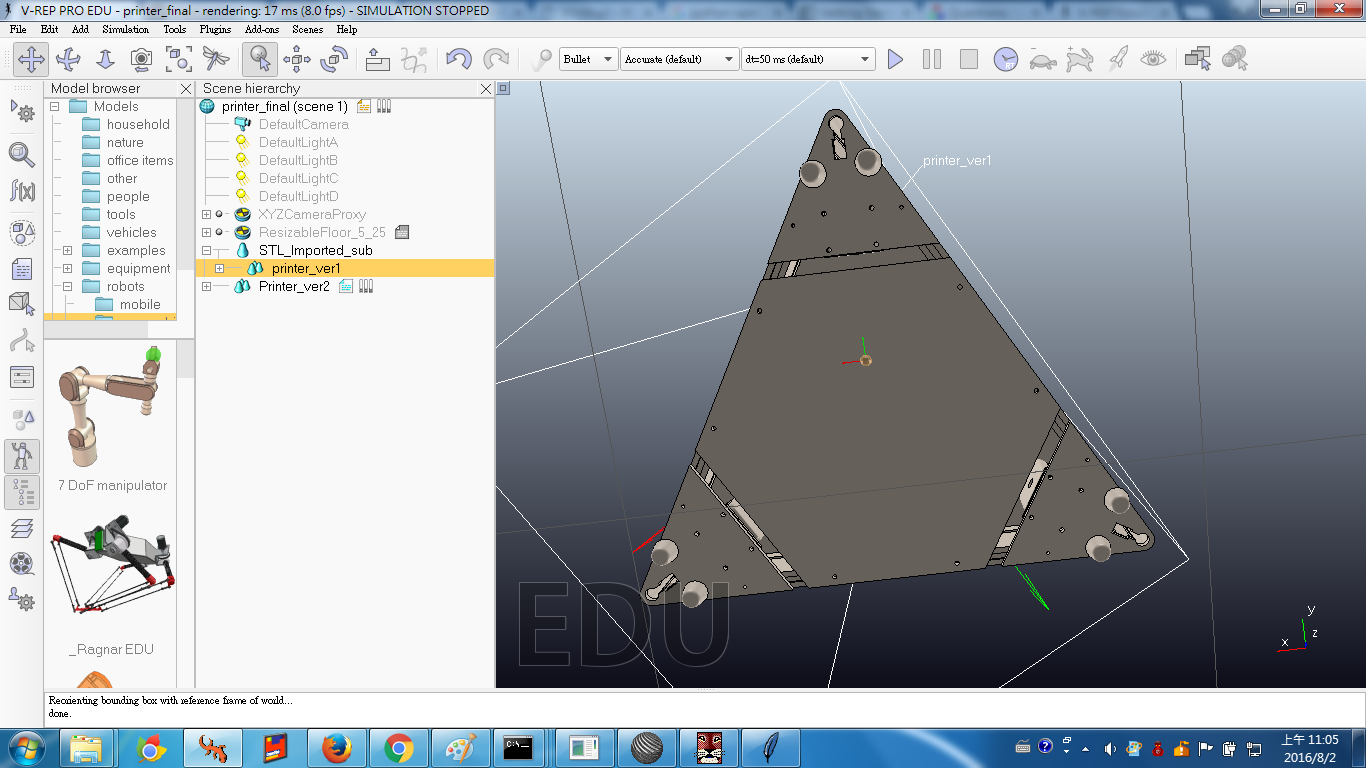
之後將主體設為此零件子屬
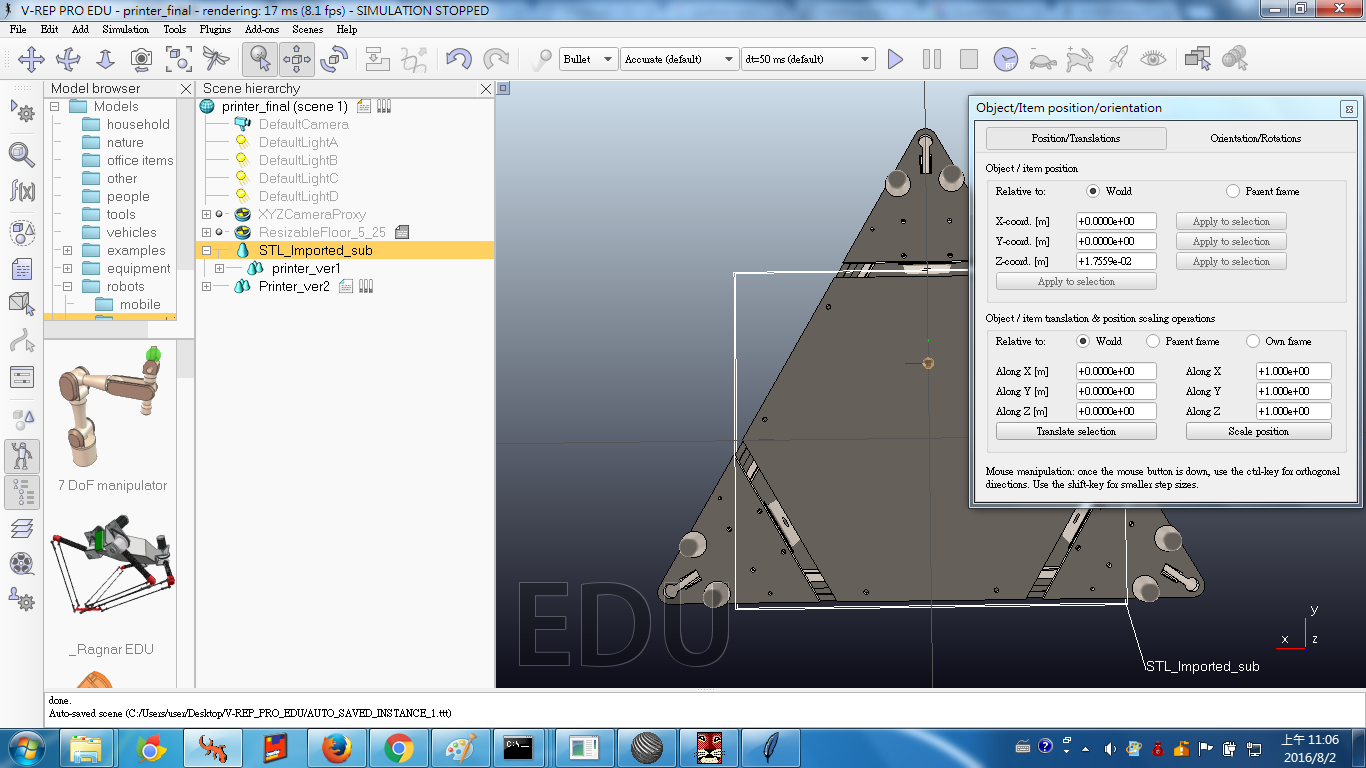
定位完之後就可以設為一個群組了
Comments
comments powered by Disqus