Pyslvs 開發進度:
- 輸入介面改善
- Debian package
- Drive shaft 面板功能
- Path track 面板功能 - 計畫
Pyslvs 開發進度
鏈鏈輸入介面改善
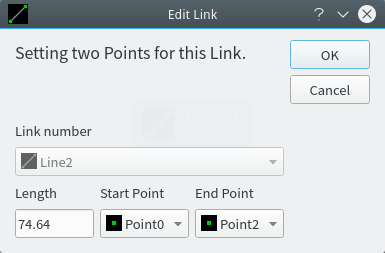
連桿和呆鍊的設定視窗會偵測當前兩點的距離,方便使用者估算。
Debian package
在 Makefile 中加入 deb 選項可以讓編譯完的 Pyslvs 包裝成 Debian 系統的安裝檔,可以當成類似 Windows 的壓縮檔安裝到 Ubuntu 使用者的家目錄 ~/Pyslvs 中。
Drive shaft 面板功能
改進了之前的水平滑桿,變成比較易懂的 QDial 旋鈕,旋轉方向與圖面一致,逆時針為正。
不過 QDial 的預設 0 的位置在正下方,要調整可能比較麻煩,因為讀值會變負的,而且起始和終止位置不一定是 0 和 360 度,所以目前尚未改掉。
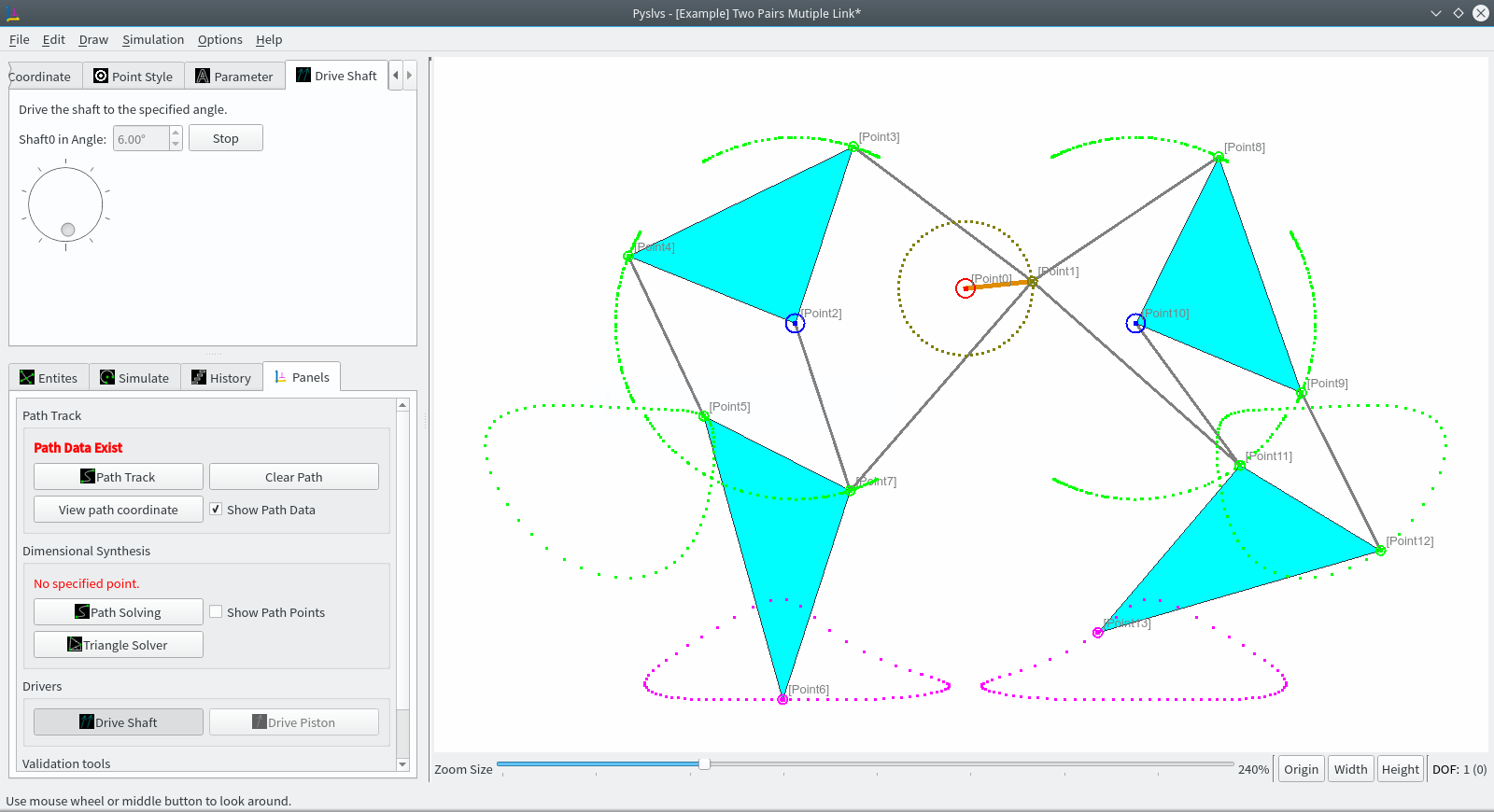
旁邊的播放鈕會自動旋轉 10 圈,可以隨時中斷,也能重新播放。
Path track 面板功能
速度和加速度的功能預計歸類到路徑追蹤的項目中,可以推導該座標的公式,並能藉由輸入值求出當前座標的速度和加速度。
Comments
comments powered by Disqus