Pyslvs 開發進度:
- slvs 格式 - 組立
Pyslvs 開發進度
由於發現 Ubuntu 上的 Solvespace 是 whitequark 倉儲編的非穩定版,嘗試之後似乎有一些 3D 約束會閃退的狀況,之後再重裝 2016 年底的穩定版看看。
所以先在 Windows 的舊版 Solvespace 上組合。
slvs 格式 - 組立
在 Windows 版的 Pyslvs 轉檔。
之前以為 Linux 檔案結構的 / 和 Windows 的反斜線會衝突,但是實際測試後發現 Python 的 os 模組和 Qt 的 QFileInfo 會按平台轉換,所以輸出沒問題。
輸出後得到組合架構圖和連桿、呆鏈的 slvs 檔。
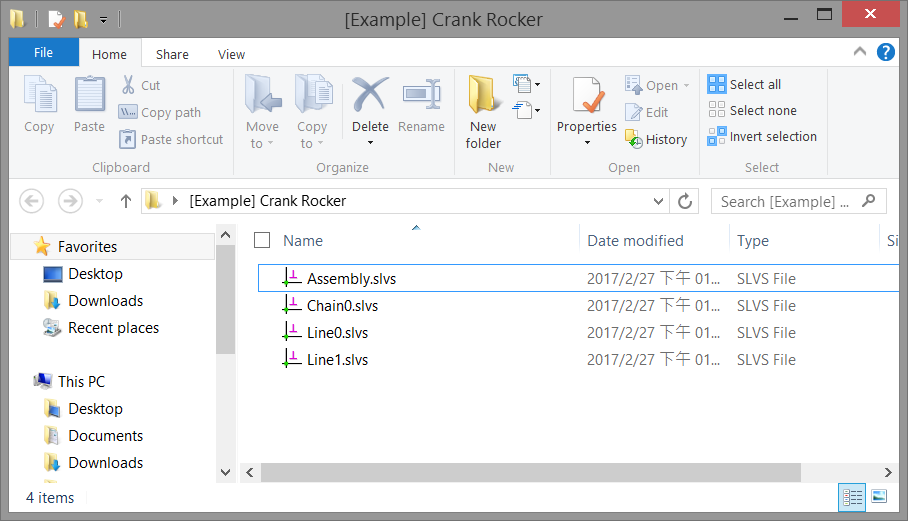
首先將這些檔案一一點開重新存檔。
舊版的 Solvespace 有跳出提示說這是新版格式的訊息,不過不影響解題。
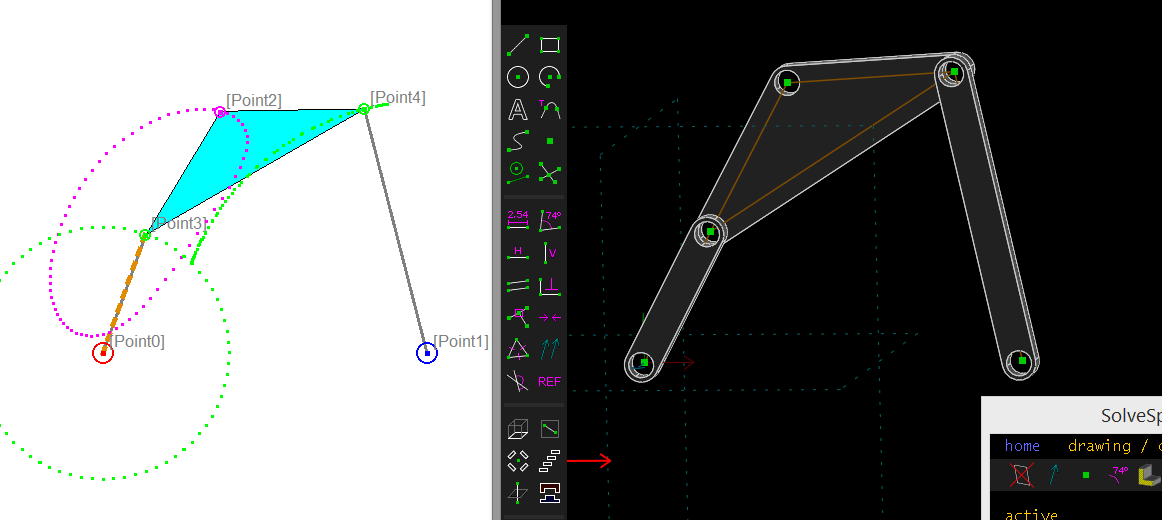
接著開啟組合架構圖,選擇 New Group > Import \ Assemble,匯入其他 slvs 檔。
這時就可以利用 Constrain point to point、Parallel、Constrain point to plane 約束將匯入文件的草圖和底層的草圖相接。而將側邊點約束到草圖平面上可以防止零件滾動。
一般來說,一個零件只要上述 3 個約束就能完全固定了。
組立完成後,就能拉動驅動軸的連桿帶動全體了。
下圖是組合完後的比對。
由於上面那張圖是第一次測試品,之後又組一隻腳的範例。
這次有開中間軸選項(直徑為 2 單位)。
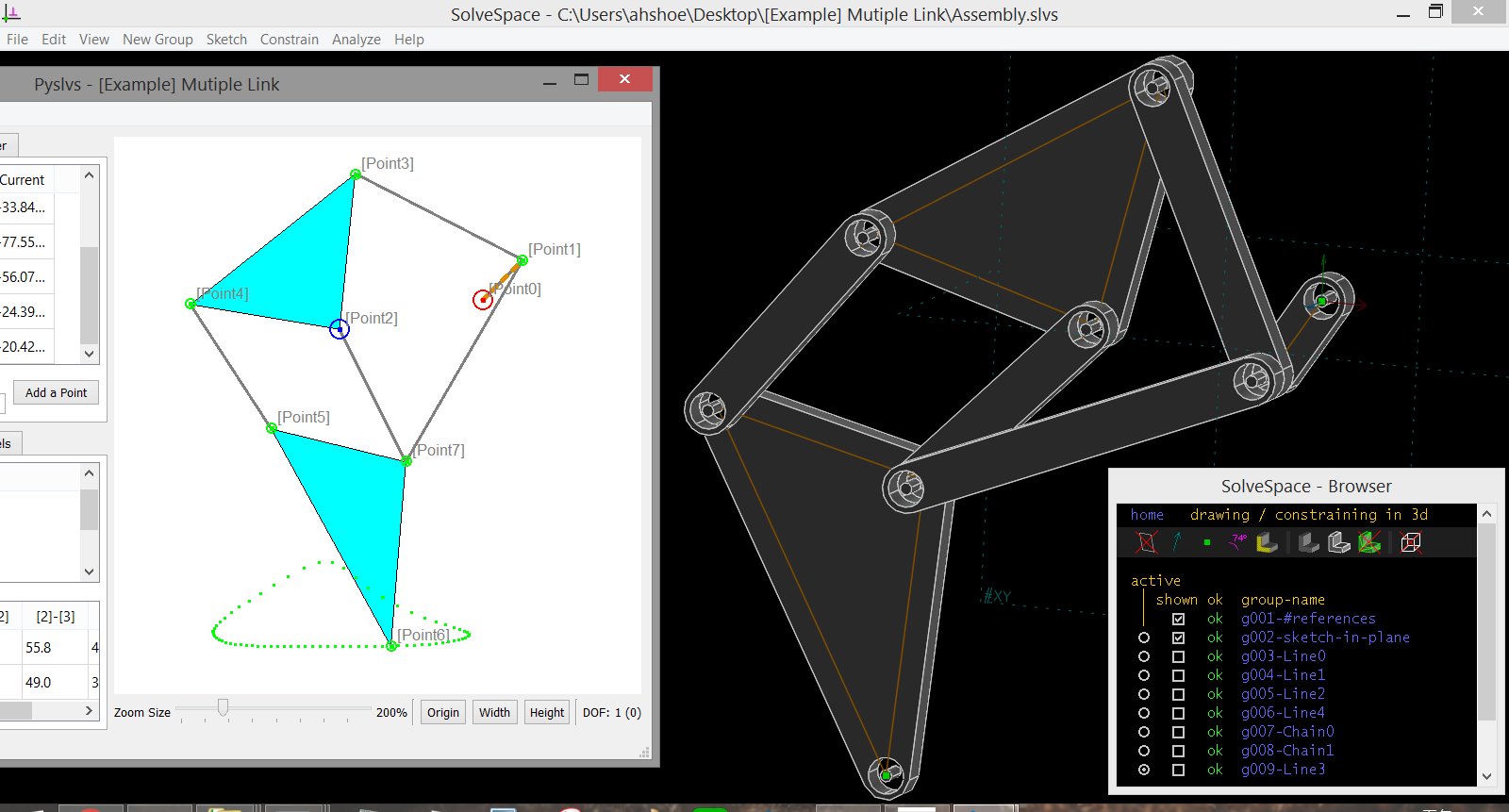
整個流程慢慢組的話不到 10 分鐘可以完成。
Comments
comments powered by Disqus