Pyslvs 編譯進度:
- 路徑演算法功能
Pyslvs 編譯進度
路徑演算法功能
Pyslvs 生成曲柄搖桿的步驟:
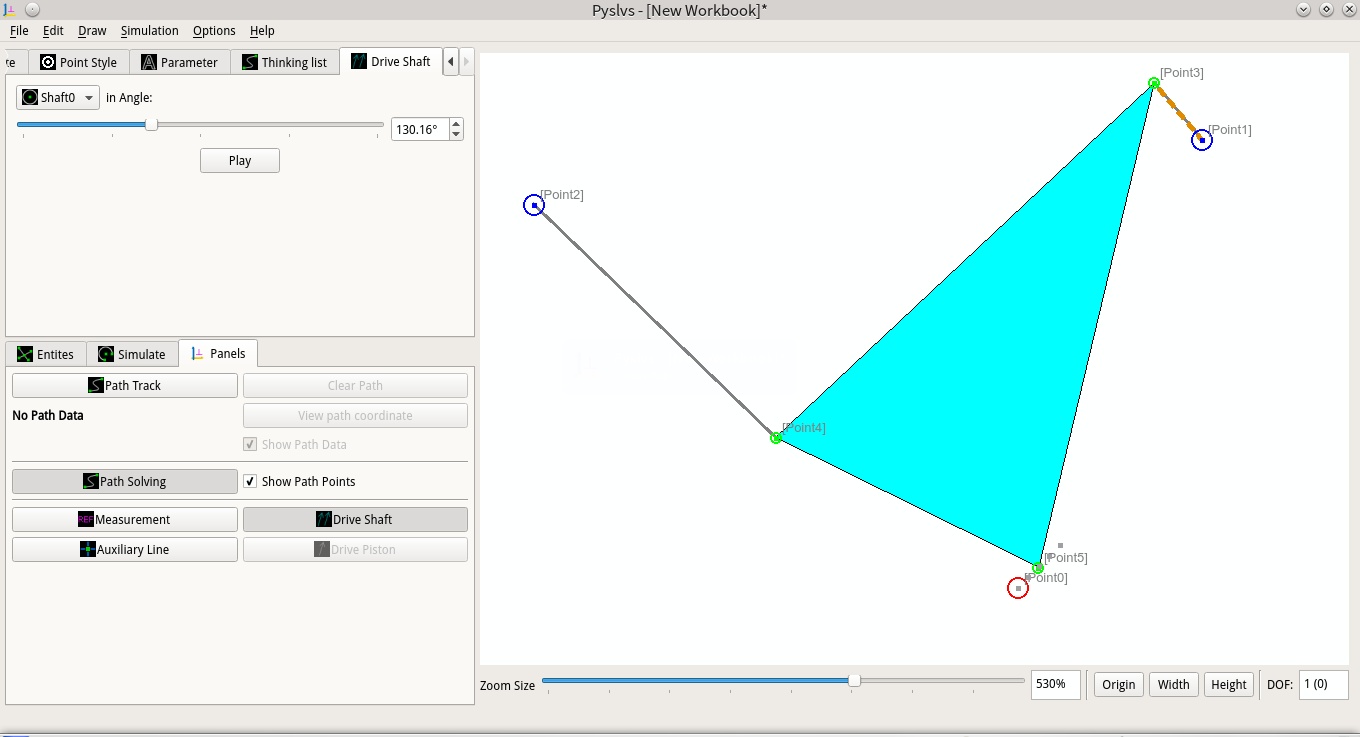
鏈 演算法算出的結果有兩種形式:
一個呆鍊的方向朝上,主動軸(短軸)在左方,為學長論文中的模型。

另一個呆鍊的端點朝下,主動軸在右方,剛好跟上述的情況相反。
雖在轉換式中做了些修正,但是有時仍然會發生 Solvespace kernel 解決失敗的情況。
大約原因應該是初始位置帶來的困擾。由於是讀取 C++ 程式庫的問題,若是學 C 語言即時運算會造成 QPainter 畫布閃爍問題(不過還不知道 QGraphicsView 的效果),之後想在發布 Version 0.4 前做一個理想化初始位置的功能。
Comments
comments powered by Disqus