Pyslvs 編譯進度:
-
捷徑功能
-
驅動軸相關
-
Kernel 其他修正
Pyslvs 編譯進度
捷徑功能
現在所有表格在項目上雙擊滑鼠左鍵,可以編輯該項目內容。
而在衝突導致解題失敗時,DOF 的欄位會顯示 "Failed" 字樣,標籤也會改成粗體紅字。
之後會再審視不方便的操作方式以改進。
驅動軸相關
改善關於驅動軸相關的功能,並且改成只能驅動 DOF 為 1 的機構。
目前畫面上顯示的解為 Shaft0 的 Demo Angle 的解,而要切換驅動軸,可以右鍵選單中的上移與下移功能,移到 Shaft0 位置的就會套用 Demo Angle 的約束;目前只剩驅動軸和參數表格有上移與下移的選項。
另外驅動軸面板的切換選單可以暫時套用選定軸的 Demo Angle 約束,關閉面板後會切回 Shaft0 的約束。
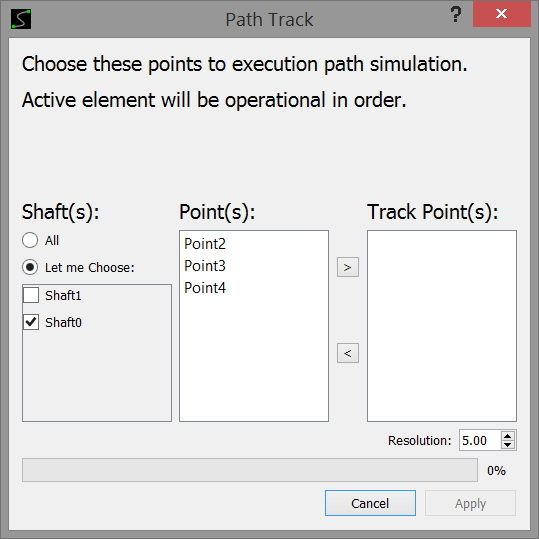
在 Path Track 功能中,用了一組選擇驅動軸的介面,不過還沒連接 function,在預設的選項中只有 Shaft0,調成 All 後將會解出所有驅動軸帶動的路徑。
設計好驅動軸的功能後,大致上就能解所有 DOF 為 1 的純連桿機構路徑了;而驅動滑塊的功能還待加入。
Kernel 其他修正
Grashof chain 範例已經全數加入,不過因為 Kernel 問題,某些範例的路徑追蹤點必須重新繪製。
與驅動軸旋轉點相依的其他點,初始值也必須做修正,不然在轉到 180 度之後,會造成其他點因為旋轉點初始位置修正,造成機構反折的狀況。
Comments
comments powered by Disqus