V-rep 翻譯 Inverse kinematics
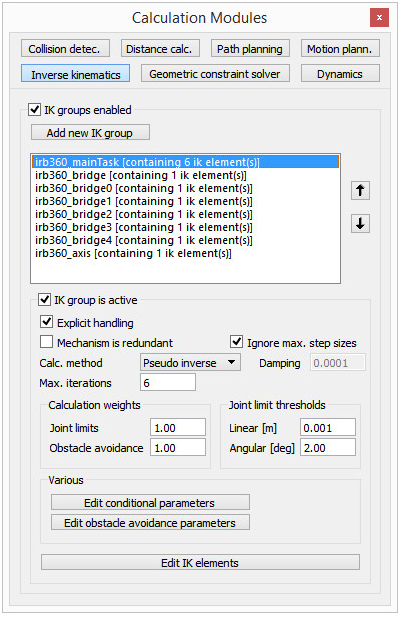
• Inverse kinematics enabled: 啟用或禁用所有IK計算。
• Add new IK group:
新增一個空的 IK group. IK groups 可以包含一個或多個 IK elements.
IK elements 是基本運動學綁著IK任務, IK groups可以組合他們來同時運行.
當需要時只使用同時運行(比依序運算花較長的計算時間).
一個IK element 總必須被一個IK group連結,而且不能單獨存在.
在按鈕下方的列表中顯示所有的IK groups將會在IK計算時被運行.
在列表中一個 IK group需要被選擇,為了顯現它的參數在剩餘的對話框中.
在列表中的順序很重要(IK group 1的結果可能被IK group 2需要來正確地或更快的執行).
在列表旁的兩個按鈕可以改變被選擇的IK group的位置.
• IK group is active: 允許啟動這個IK groups.
• Explicit handling:
表示被選擇的IK group 是否應該被明確地處理.
如果打勾, 當呼叫simHandleIkGroup(sim_handle_all_except_explicit)時,
在IK 計算這個IK group將不會被處理,但只有當
simHandleIkGroup(sim_handle_all) or
simHandleIkGroup(ikGroupHandle) 呼叫時除外.
這是非常有用的當如果用戶希望在 child script 而不是在 main script
處理IK group裡的kinematics (如果沒有打勾, IK計算將會被執行兩次,一次是在
main script呼叫simHandleIkGroup(sim_handle_all_except_explicit) 時,
另一次是在child script 呼叫simHandleIkGroup(ikGroupHandle)時.
• Mechanism is redundant:
當被打勾時, 在IK解析時joint限制校正將被啟用.
否則,joint limits 將會簡單地被強制執行在IK 解析之後,可能導致不穩定.
• Ignore max. step sizes: 如果被勾選,在 joint properties 裡的maximum step sizes 將會被忽略.
• Calc. method:
具體說明IK group 決定使用的計算方式.
Pseudo inverse 是最快的方式但可能不穩定當目標與 tip lie 距離太遠, 當一個運動鏈超過限制或當機構靠近一個單一組態 或 超出目標.
DLS 是較慢但更穩定因為它是一個阻尼分析方式(阻尼因子可以被指定(阻尼)).
這是一個好的選擇當 pseudo inverse可能失敗.
• Damping:
阻尼因子當使用DLS. 較大的值導致更穩定的分辨率,但速度很慢。適當地調整值是重要的。
• Max. iterations:
重複的最大數值可以被指定. 這是計算經過的最大數量對於給予的IK group,直到它指定的結果精度到達. DLS 經常需要比 Pseudo inverse更多的重複.
• Joint limits (calculation weights):
the calculation weight 應該被使用在 joint limitation constraints
(joint limitation constraints 是被指定在 joint properties
(position minimum andposition range).
• Obstacle avoidance (calculation weights):
the calculation weight 應該被使用對於 obstacle avoidance(避開障礙物) constraints.
• Joint limit thresholds: 線性和角度的臨界值應該和joint limitation constraints 一起被使用.
• Edit conditional parameters: 調整選擇的IK group裡附加的參數 .
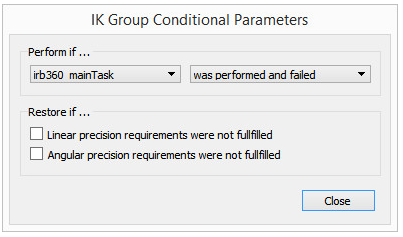
• Perform if... :
這是有條件的分析部分.
使用者可以選擇下拉一個在列表中的IK group,
這個IK分析結果將會決定當前IK group是否會被解決。
被認為是成功的IK group計算的IK elements都位於指定的線性/角度精度內。
• Restore if... :
允許恢復初始IK group配置(goint values)如果分析沒有成功 (位置和/或定向精度沒有達到).
與上述條件的解結合時,用戶可以例如結合兩個不同的計算方法。
這是有用的如果在操作者的目標可能超出範圍或靠近一個單一組態:
第一次分析嘗試將試著求解IK group與non-damped resolution method (pseudo inverse, fast),
而且如果不成功, 第二次嘗試將會試著解決它與damped resolution method (DLS, slower).
使用者也當然可以自由手動地處理IK resolution 從script, plugin, 等.
• Edit obstacle avoidance parameters:
允許調整避障參數。
請注意,這只是對熟練的操作者有意義,
而且模擬速度會大幅度地放緩。
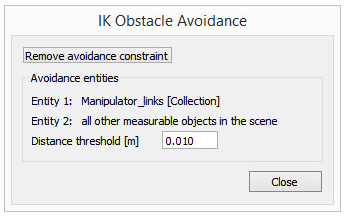
• Select avoidance entities / Remove avoidance constraint:
允許選擇/移除avoidance entities.
一個整體通常是機器人,其他實體是障礙物。
使用簡單地measurable objects 來快速分析.
• Distance threshold:
在兩個avoidance entities 之間應該保持最小的距離.
• Edit IK elements:
允許編輯各種被選擇的IK group有關聯的IK elements.
Comments
comments powered by Disqus