V-rep
熟悉 V-Rep 基本操作

1. 2D移動
2. 3D旋轉
3. 遠近
4. 移動畫面至物體
5. 物體定位(x,y,z)
6. 物體旋轉(x,y,z)
7. 開始模擬
8. 暫停模擬
9. 結束模擬
10. 慢速
11. 加速
嘗試製作 one_link_robot
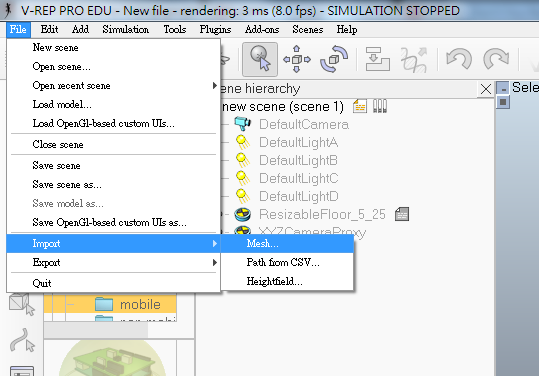
File→import→Mesh...(從資料夾中輸入 stl檔)
選擇單位和方向
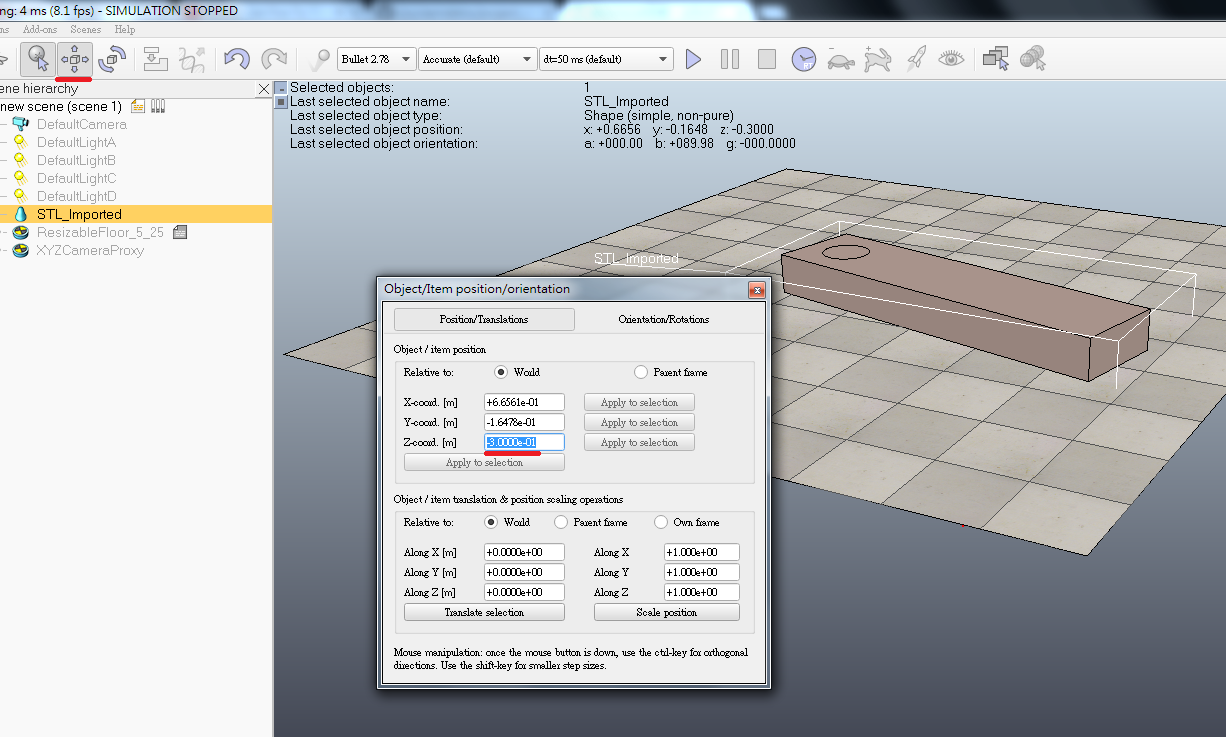
點選物體使用"object shift"調整Z軸距離
點選物體 右鍵→Edit→Grouping/Merging→Divide selected shapes(使物體解體)
右鍵→Add→Joint→Revolute(增加旋轉軸)
連點兩下Revolute icon 打開 Scene Object Properties , 下面 Visual properties修改旋轉軸的長和直徑
接著點下面 Show dynamic properties dialog , 打勾Motor enabled 和 Lock motor ...
再來點旋轉軸 , Ctrl+左鍵點圓柱 , 使用"object shift"在XYZ都點Apply to selection , 在"Orientation/Rotations"也點 Apply , 使兩軸重疊
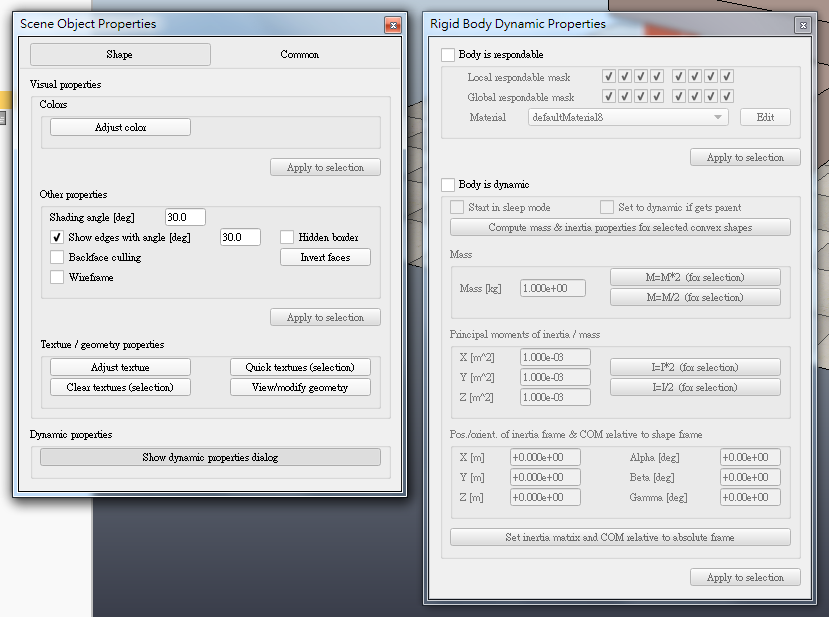
點選圓柱 icon , 點最下面Show dynamic properties dialog , 打勾Body is dynamic(使物體可作動)
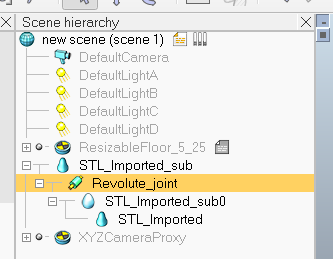
使圓柱降階成為旋轉軸的Child
使旋轉物降階成為圓柱的Child
使旋轉軸降階成為底座的Child
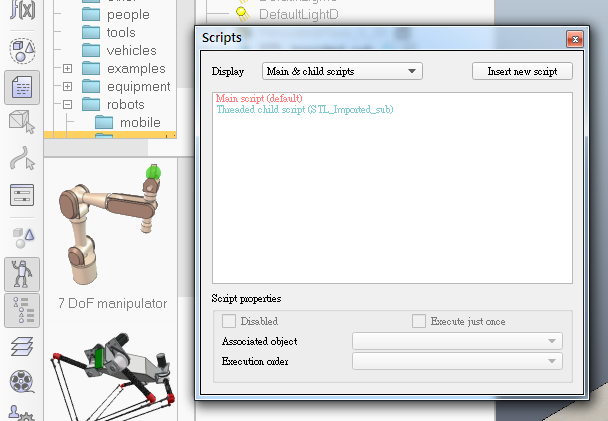
按左側"Script" →Insert new script→Script type 選擇 Child script (threaded) , 下方 Associated object 選擇底座.
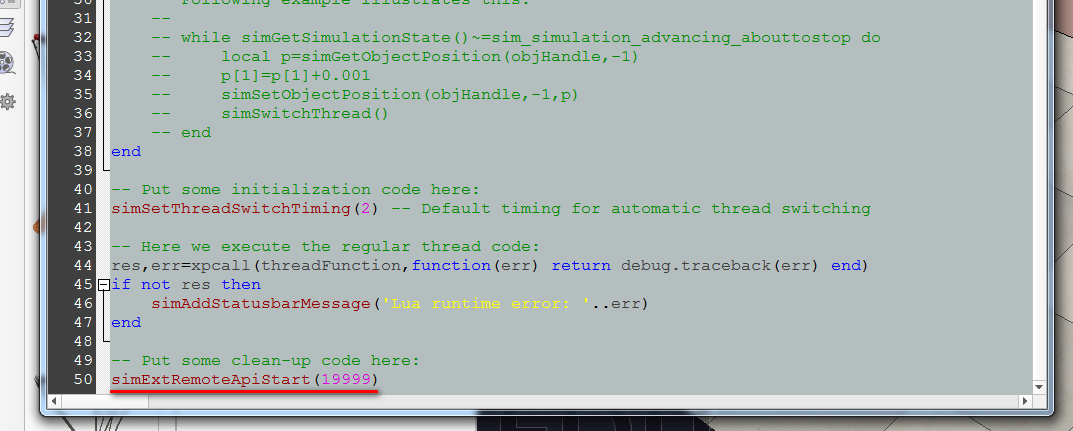
double - click the child script, 在最下面加上SimExtRemoteApiStart(19999)(參考老師範例研究中)
點選"Start simulation" 啟動模擬 , 用SciTE 開啟老師的檔案 one_link_robot_remoteAPI.py , F5執行就會轉囉~~
製作影片:
使旋轉物降階成為圓柱的Child
使旋轉軸降階成為底座的Child
V-Rep one_link_robot from Li Steven on Vimeo.
Comments
comments powered by Disqus